ここではロボットを組み立てます。
道具を準備してください。

・サーボを取り付けるため、細めのプラスドライバーを使います。
・パッケージの箱にケーブルを通す穴を開けるため、カッターナイフが必要です。
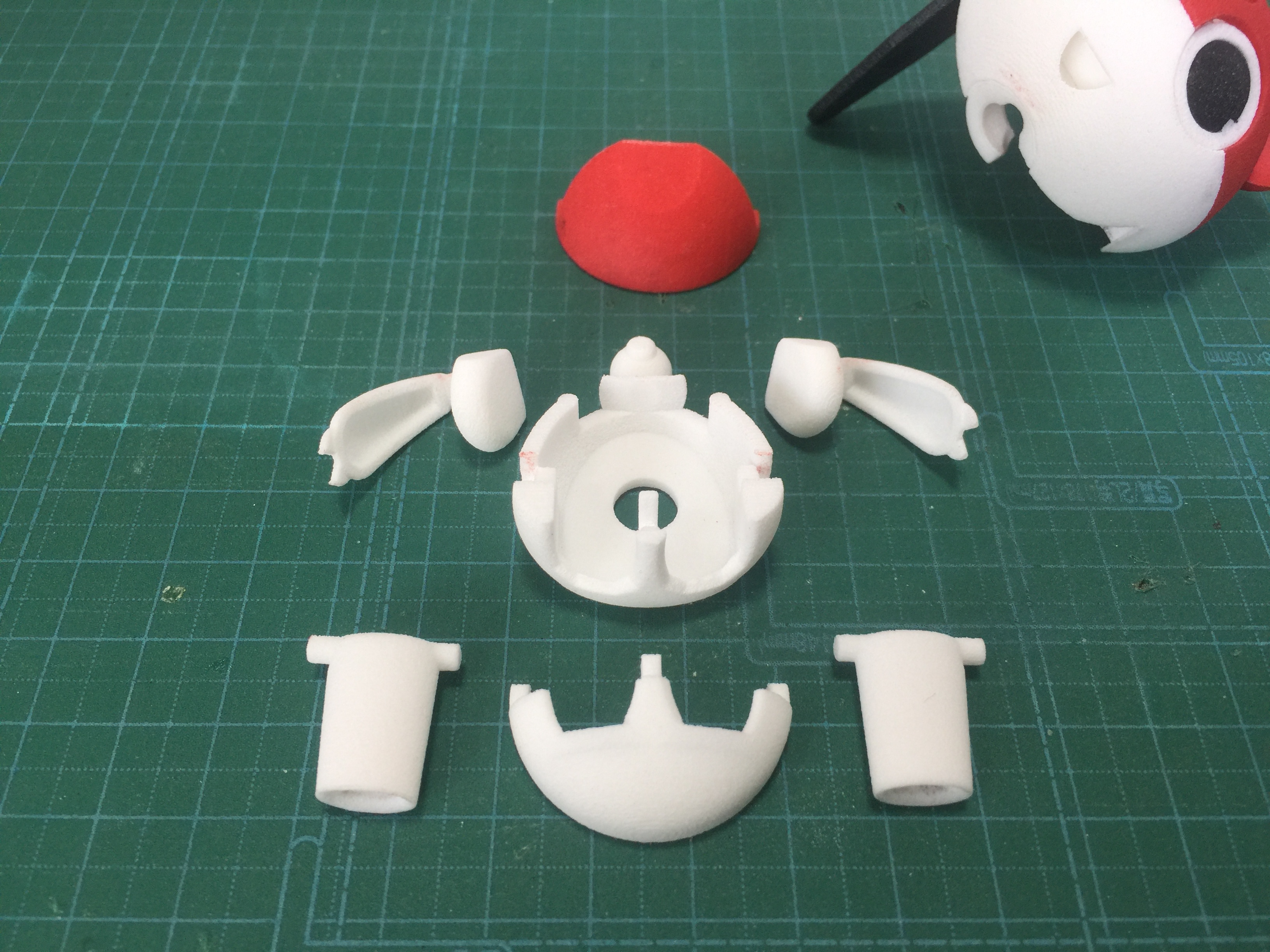
キットからロボットのパーツを取り出してください。

まずは頭部を組み立てましょう。

メガネに目玉をはめこみます。目玉には切り欠きがあり、決まった向きにしかはまりません。斜めになっていると巧くはまらないので、垂直にぎゅっと押し込んでください。

メガネを顔パーツにはめます。鼻のあたりでパチンとはまるようにできています。

メガネパーツの上からLED固定パーツを差し込みます。このパーツは額や目をLEDで光らせるときに使いますが、頭部にカメラを内蔵するときは取り外します。
頭パーツをとりつけます。これも鼻のあたりでパチンとハマります。お好みに合わせて耳パーツもつけてください。

右クシを後頭部から差し込んで頭と顔を固定します。クシには向きがありますので注意してください。矢印の刻印を内側にして、矢印の向きが上になるように差し込みます。

次に体を組み立てます。
背中パーツに腹パーツをとりつけ、穴に足パーツを落とします。足には前後の向きがあるので注意してください。平らな方が後ろで、斜めになっているほうが前です。

背中パーツを寝かせ、腕パーツを乗せてください。腕パーツには前後はなく、左右も同じです。
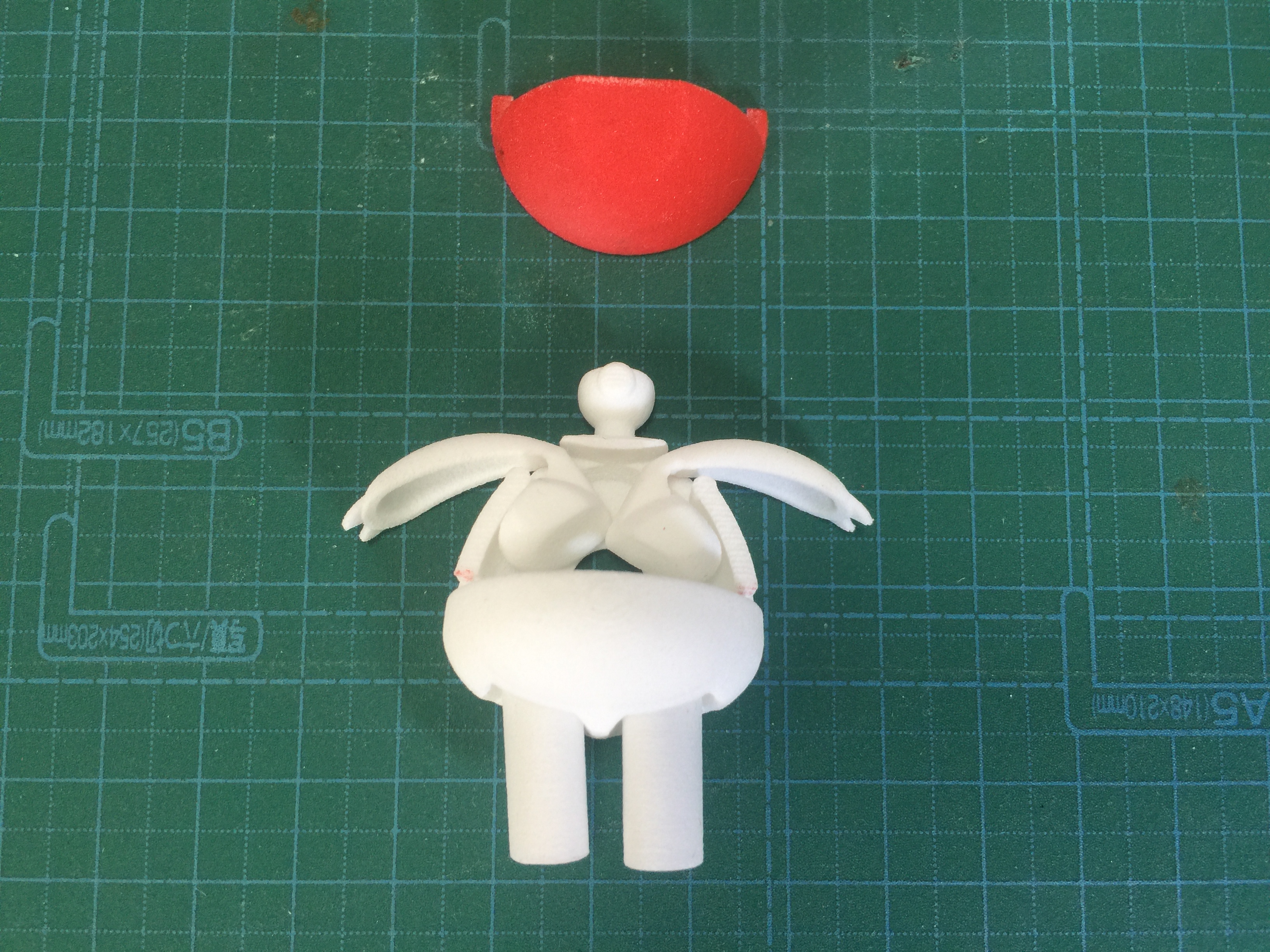
胸パーツでフタをすれば、体の完成です。
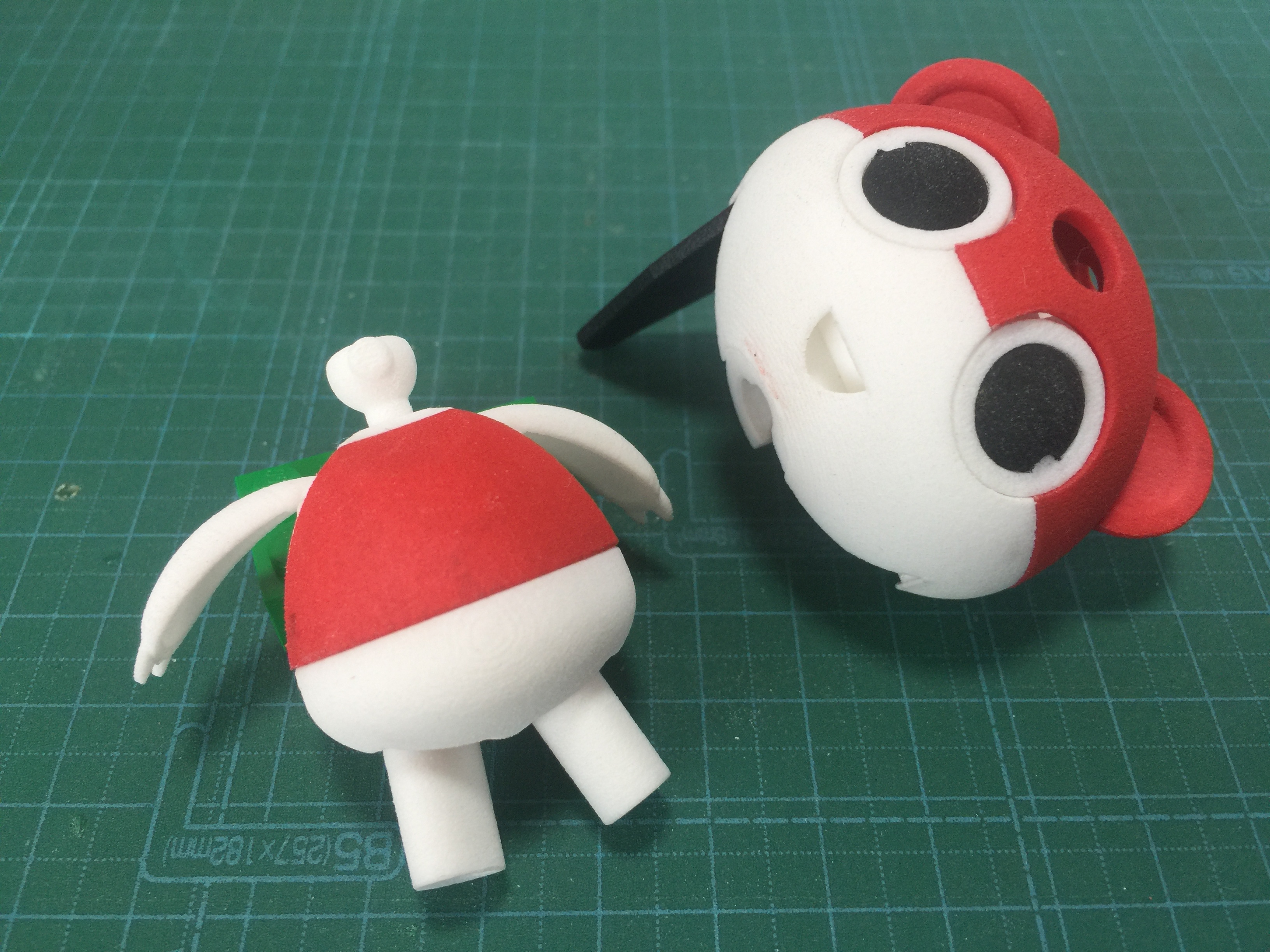
頭部の斜め後ろから、体を斜めに差し込みます。
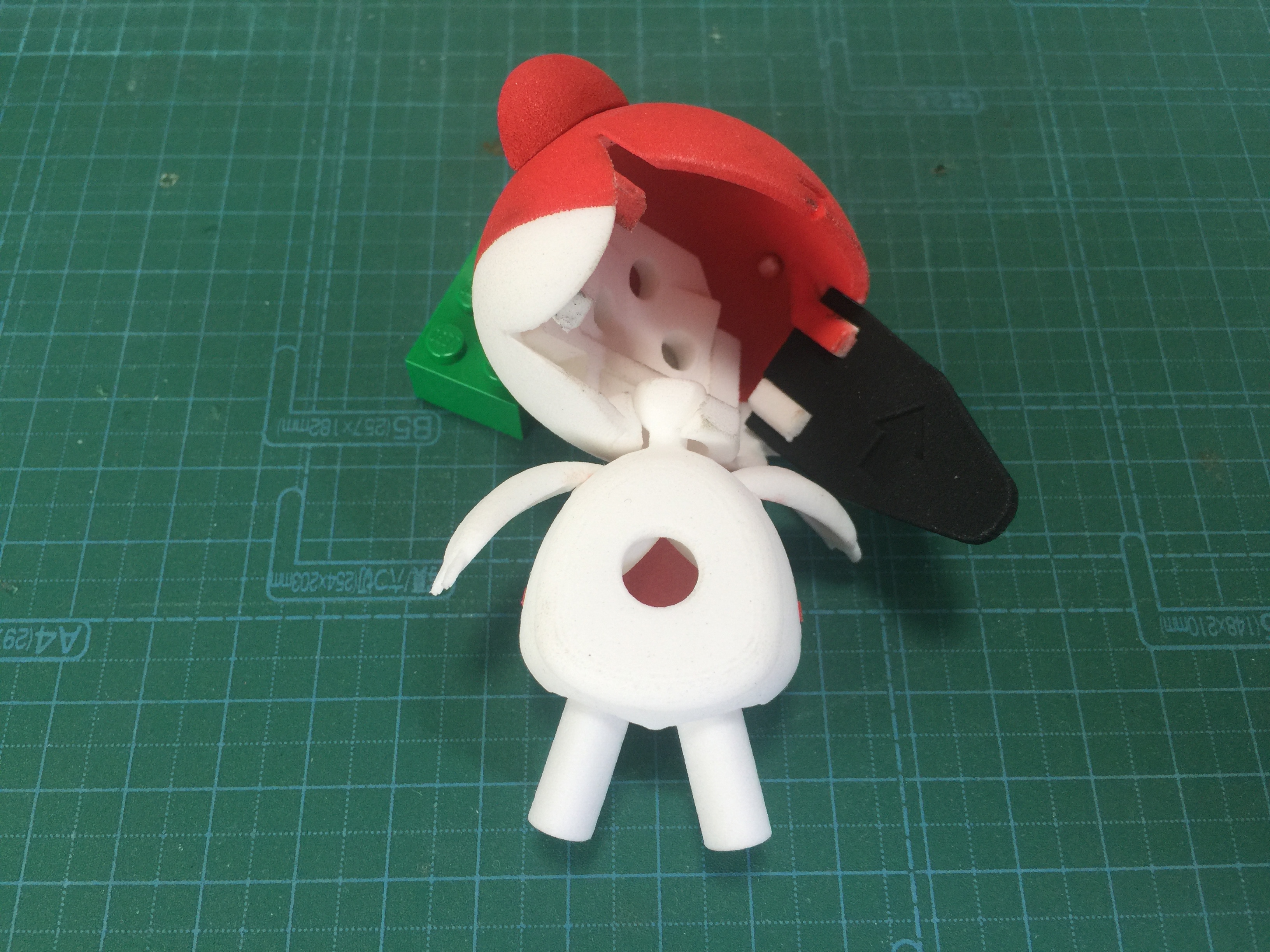
体を回転させて正面を向かせると、体が首からぶらさがります。

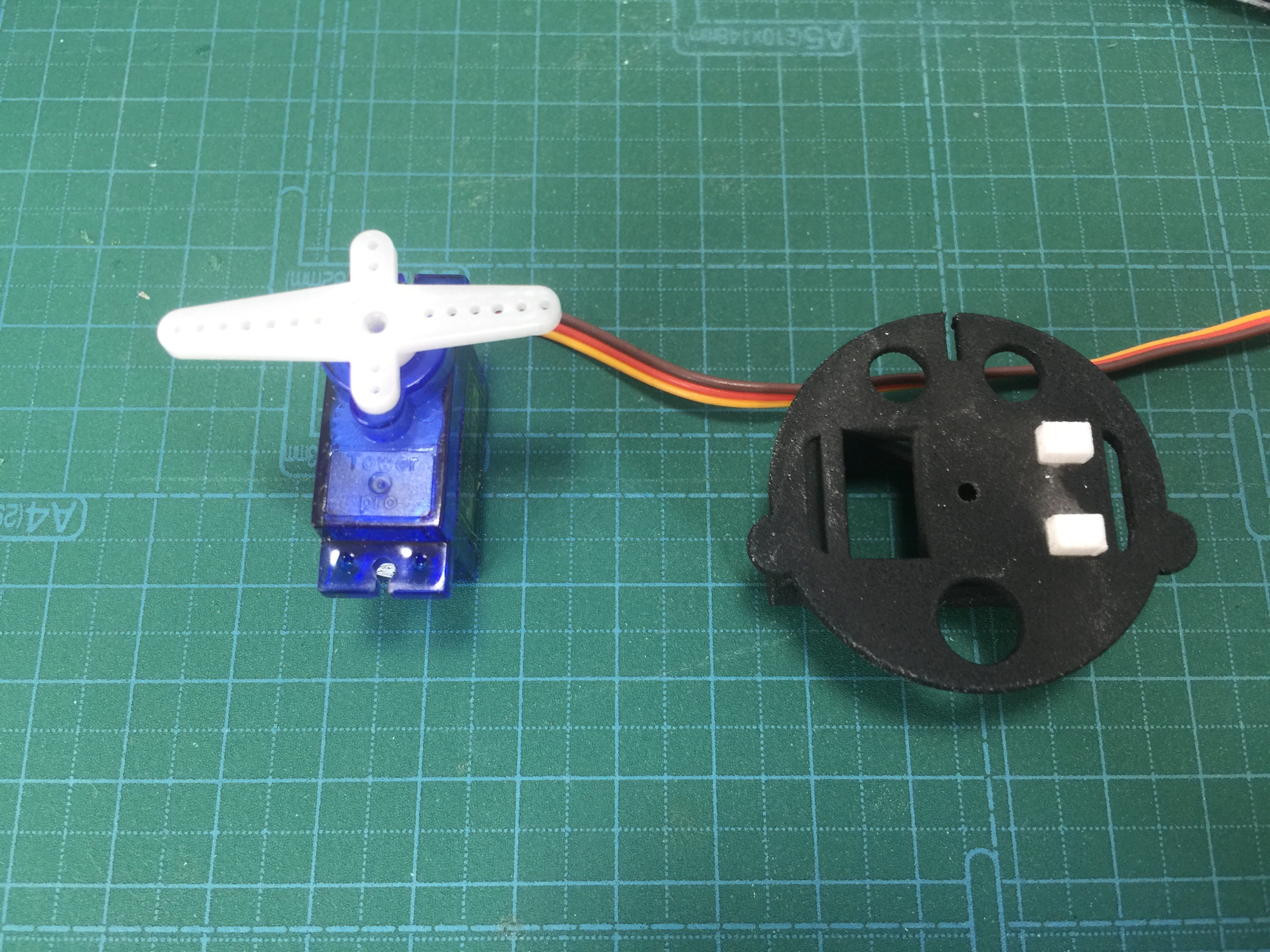
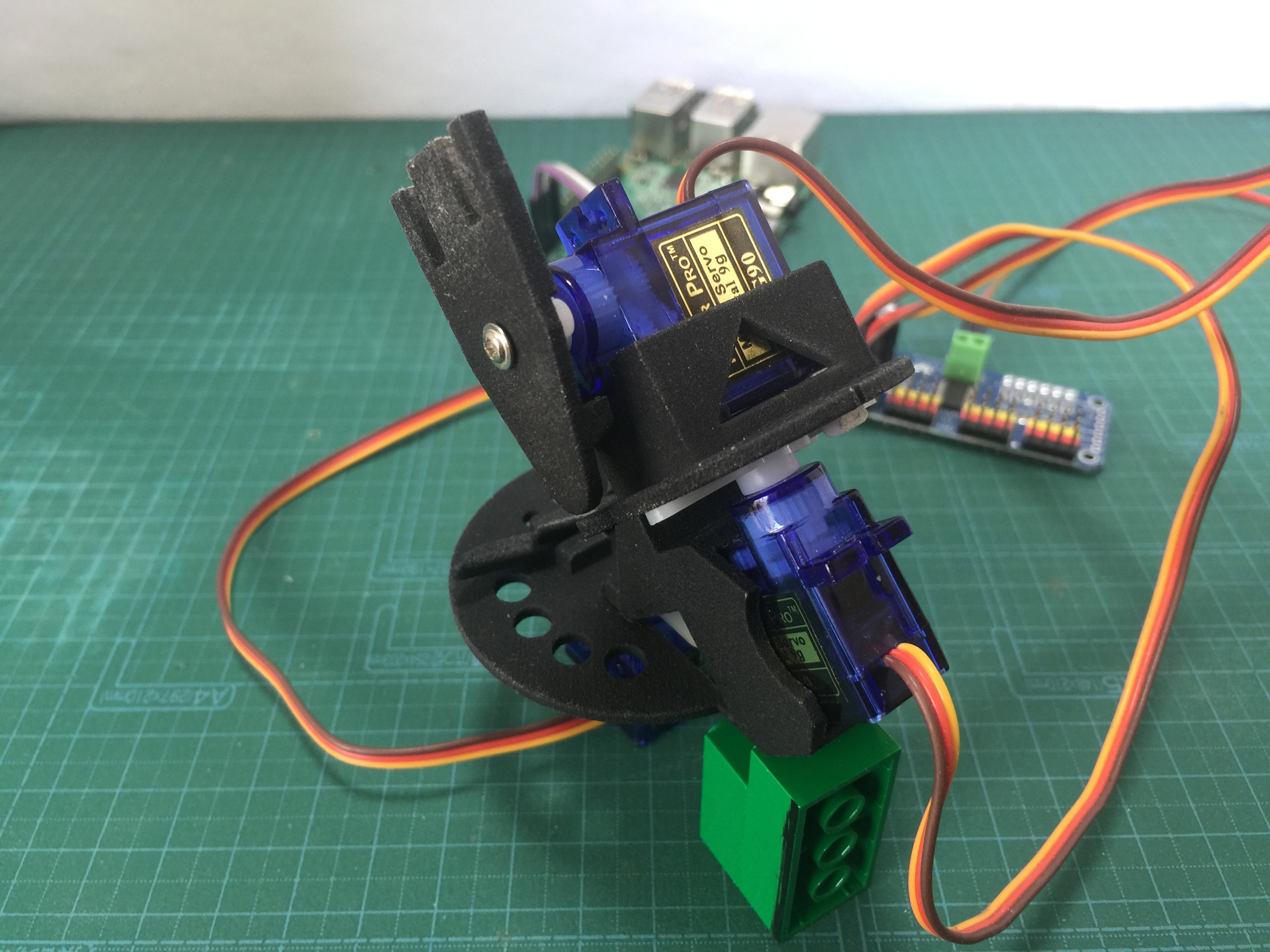
続いてロボットを動かすスタンドを作ります。サーボを用意してください。センタリングしていない場合はセンタリングしてください。写真ではサーボドライバボードにつながったままになってますが、いったんはずしたほうが作業は楽だと思います。
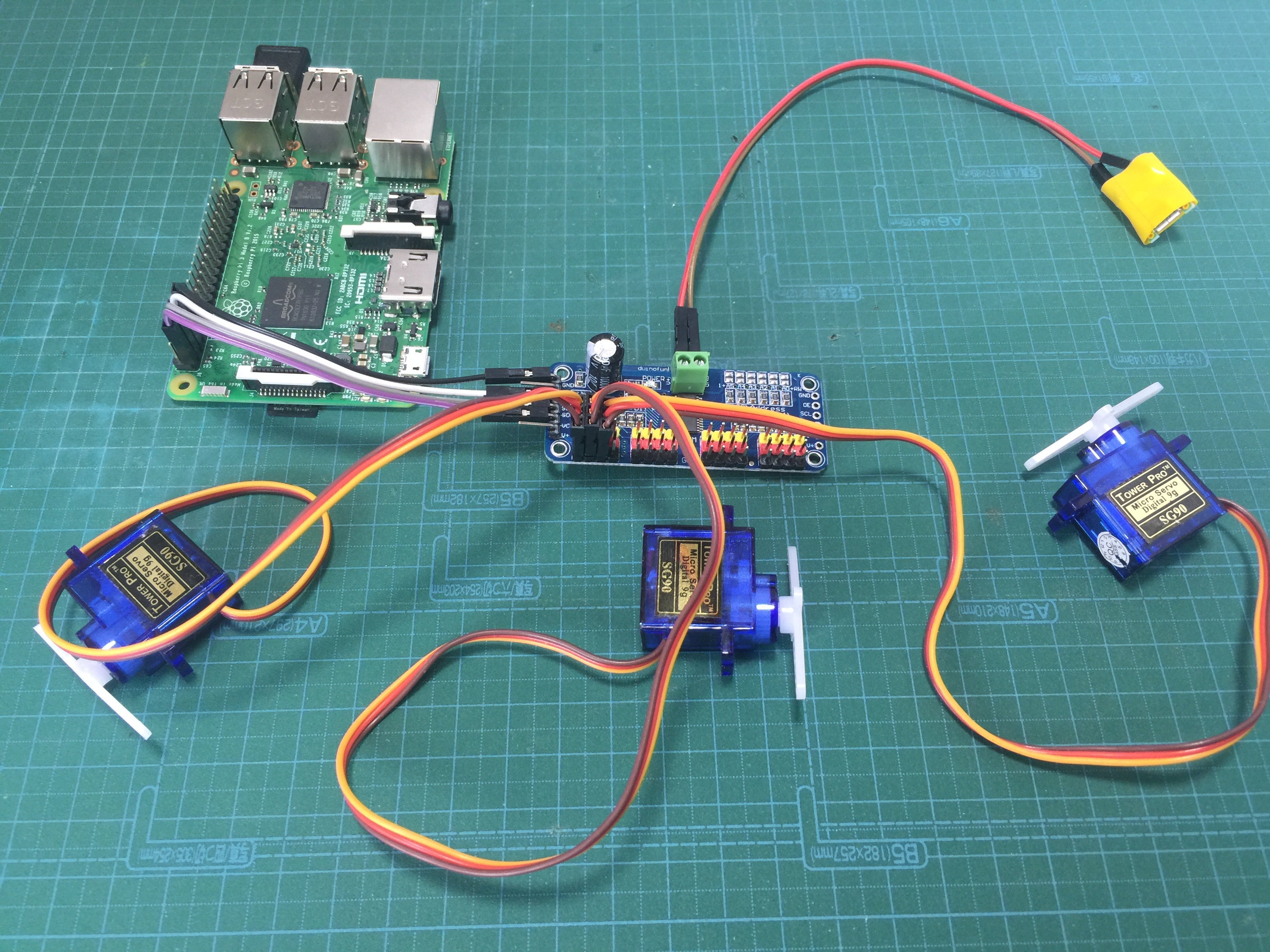
ちなみに各サーボに付属している部品のうち使うのは長いネジ1本と十字型のサーボホーン(白いプラスチックのパーツ)だけなので、下の写真に映っている部品は使いません。

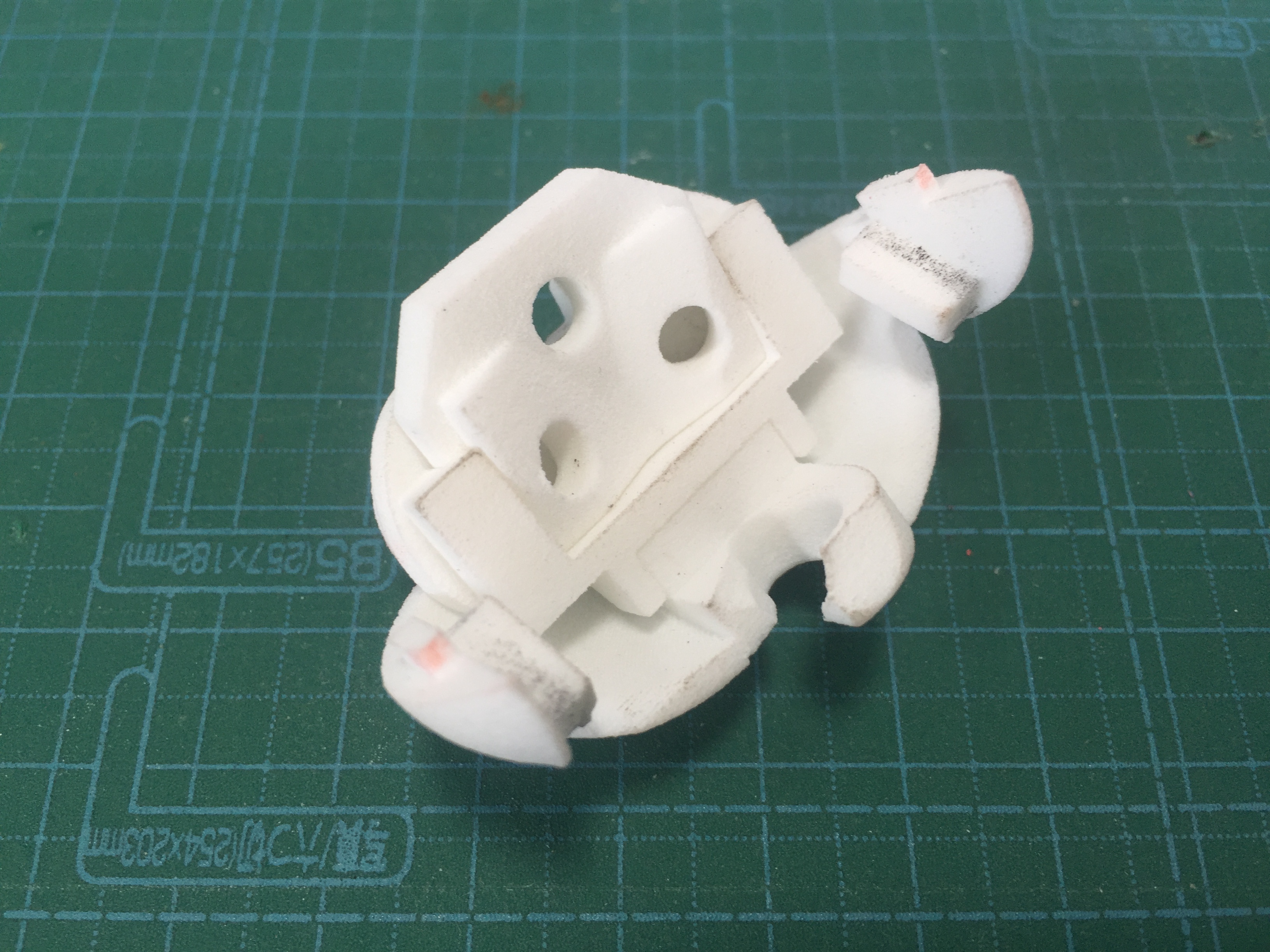
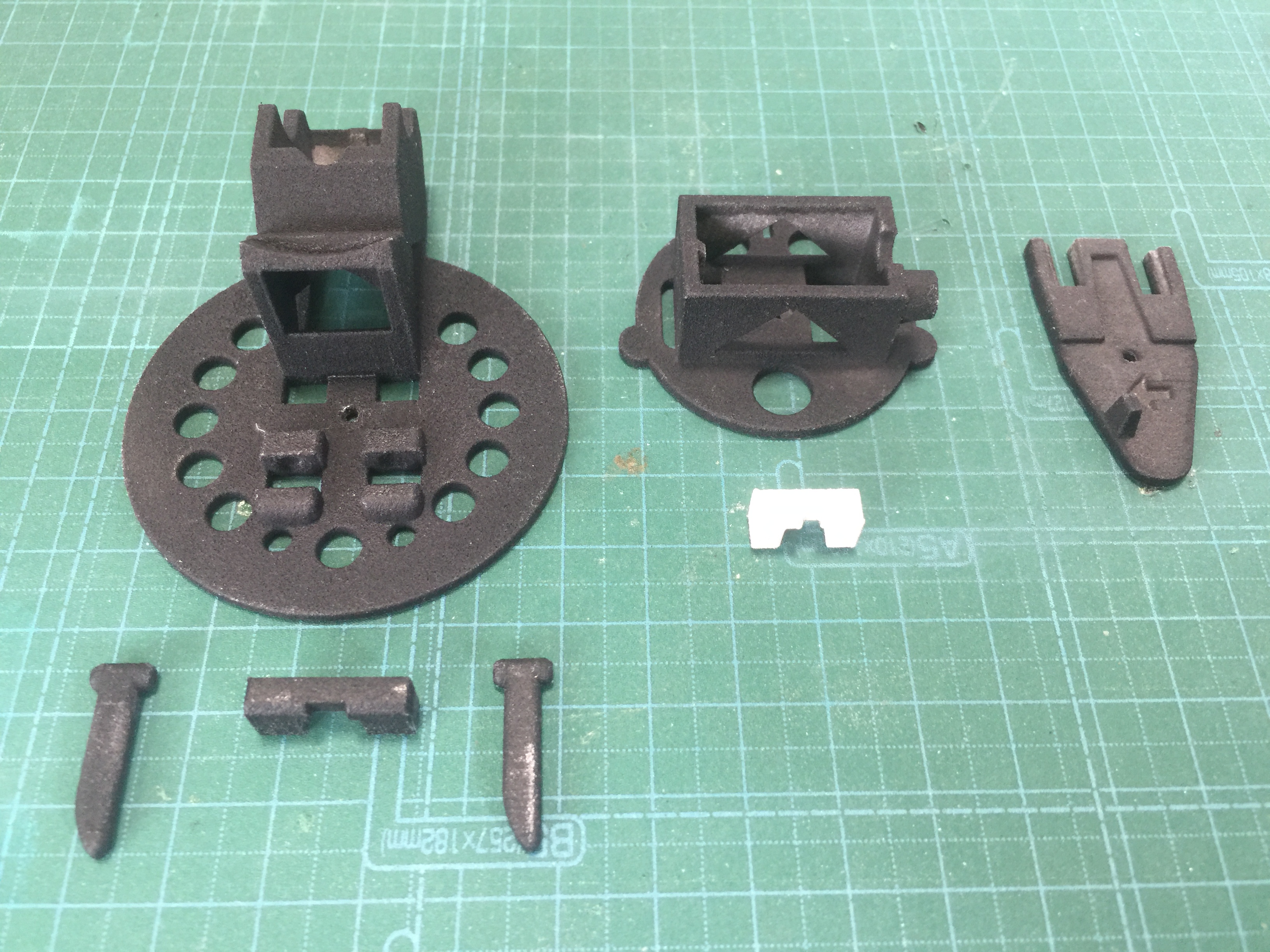
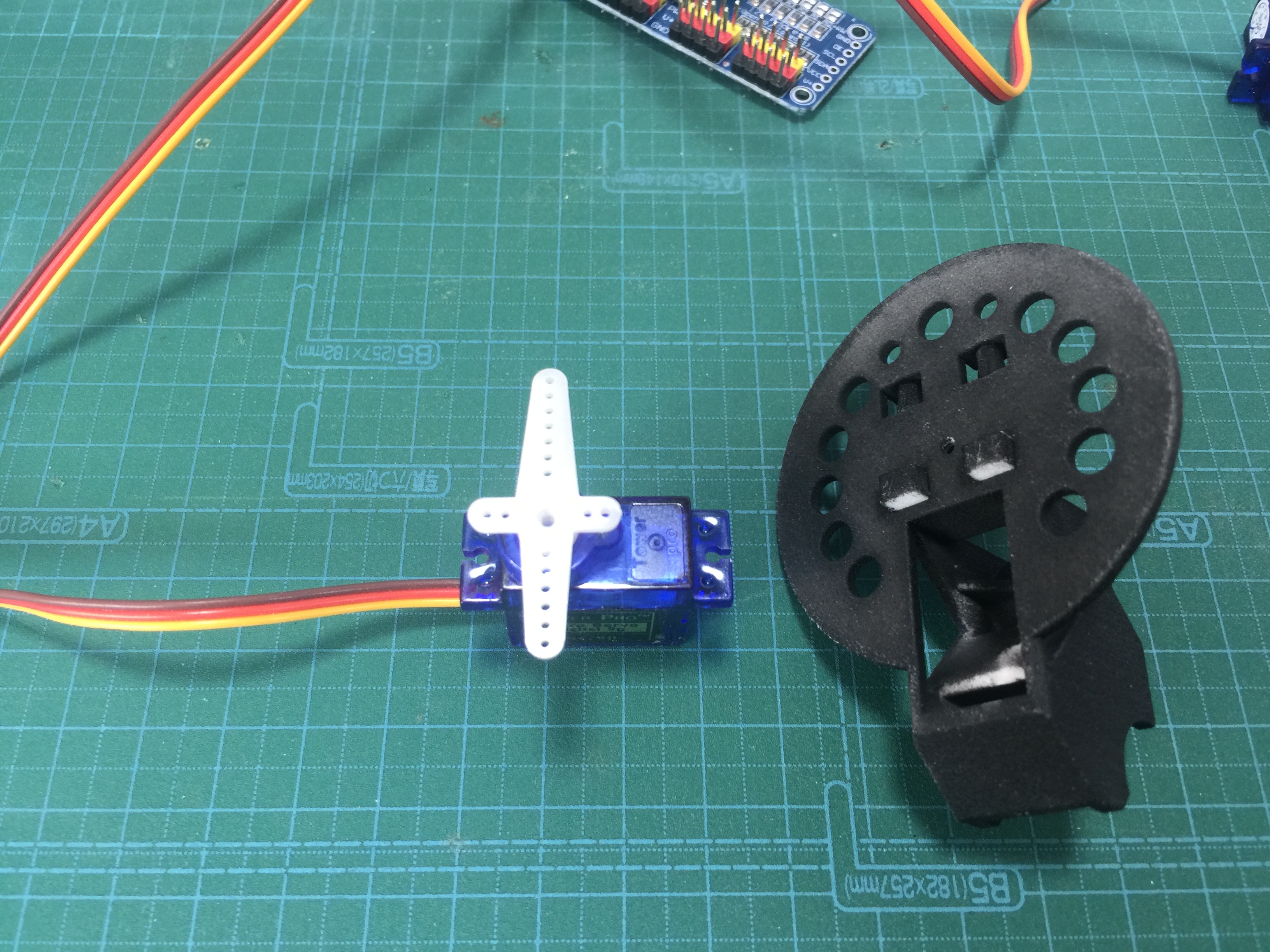
スタンドのパーツを取り出してください。左からテーブル、ジョイント、左クシと呼んでいます。
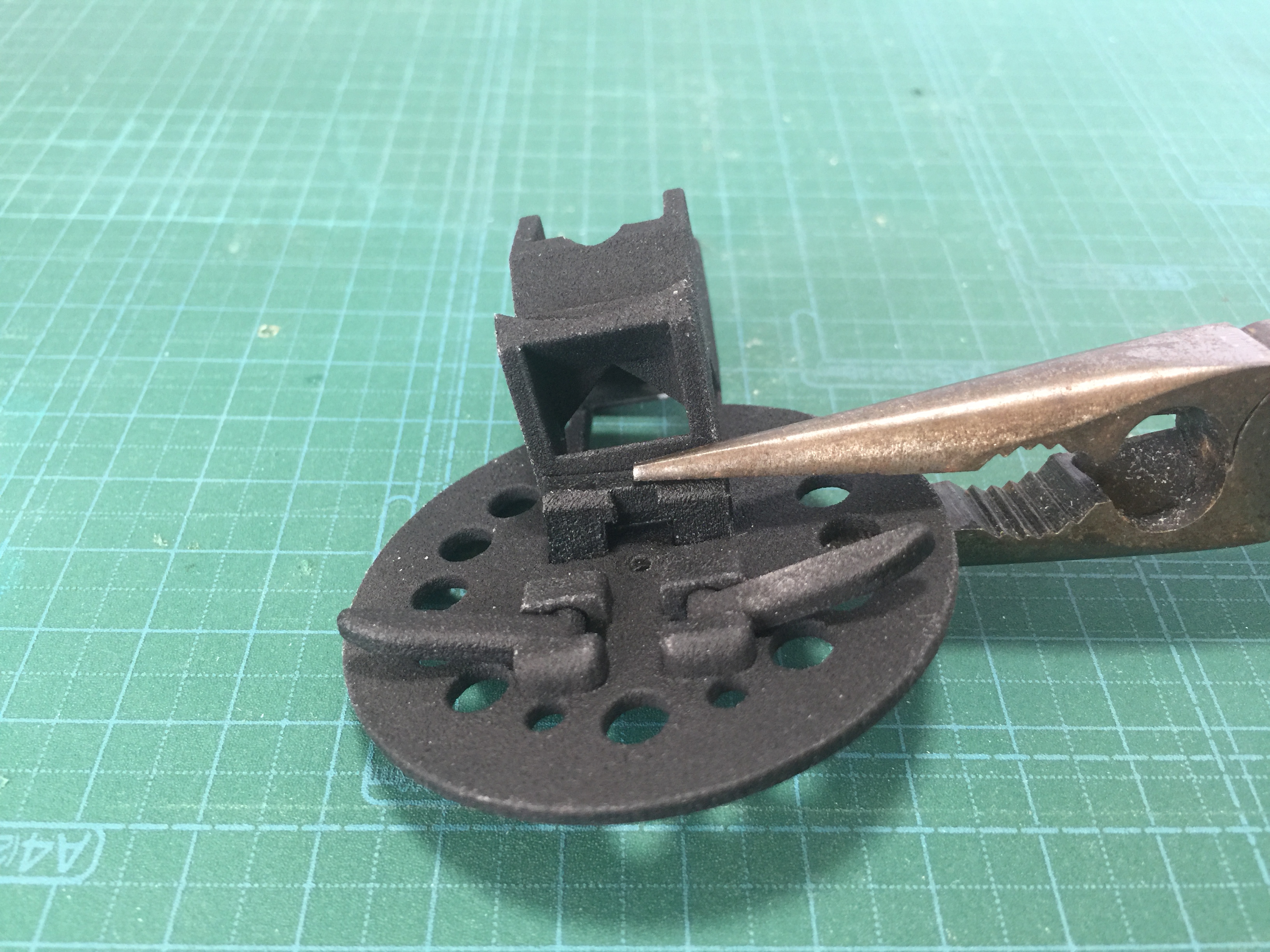
テーブルに足首パーツを取り付けてください。足首パーツには前後がありますので、斜めになっているほうを前にして取り付けます。指でパーツをもってひねりながら押し込めばはまります。指の力が弱いひとはペンチを使ってください。
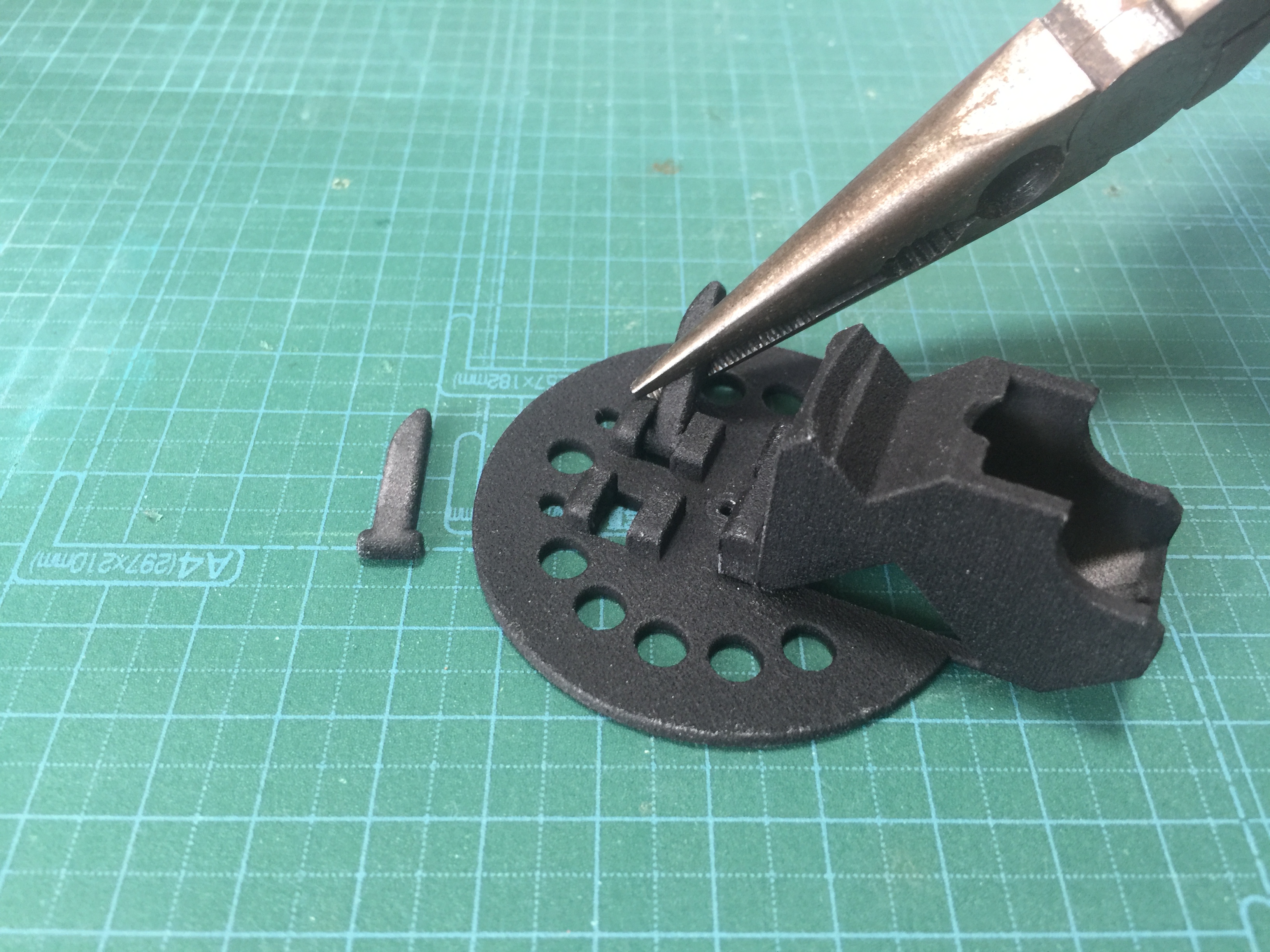
テーブルに黒いサーボ固定パーツを差し込んでください。サーボ固定パーツには前後があります。窪みがあるほうを前方にしてください。指の力が弱いひとはペンチを使ってください。
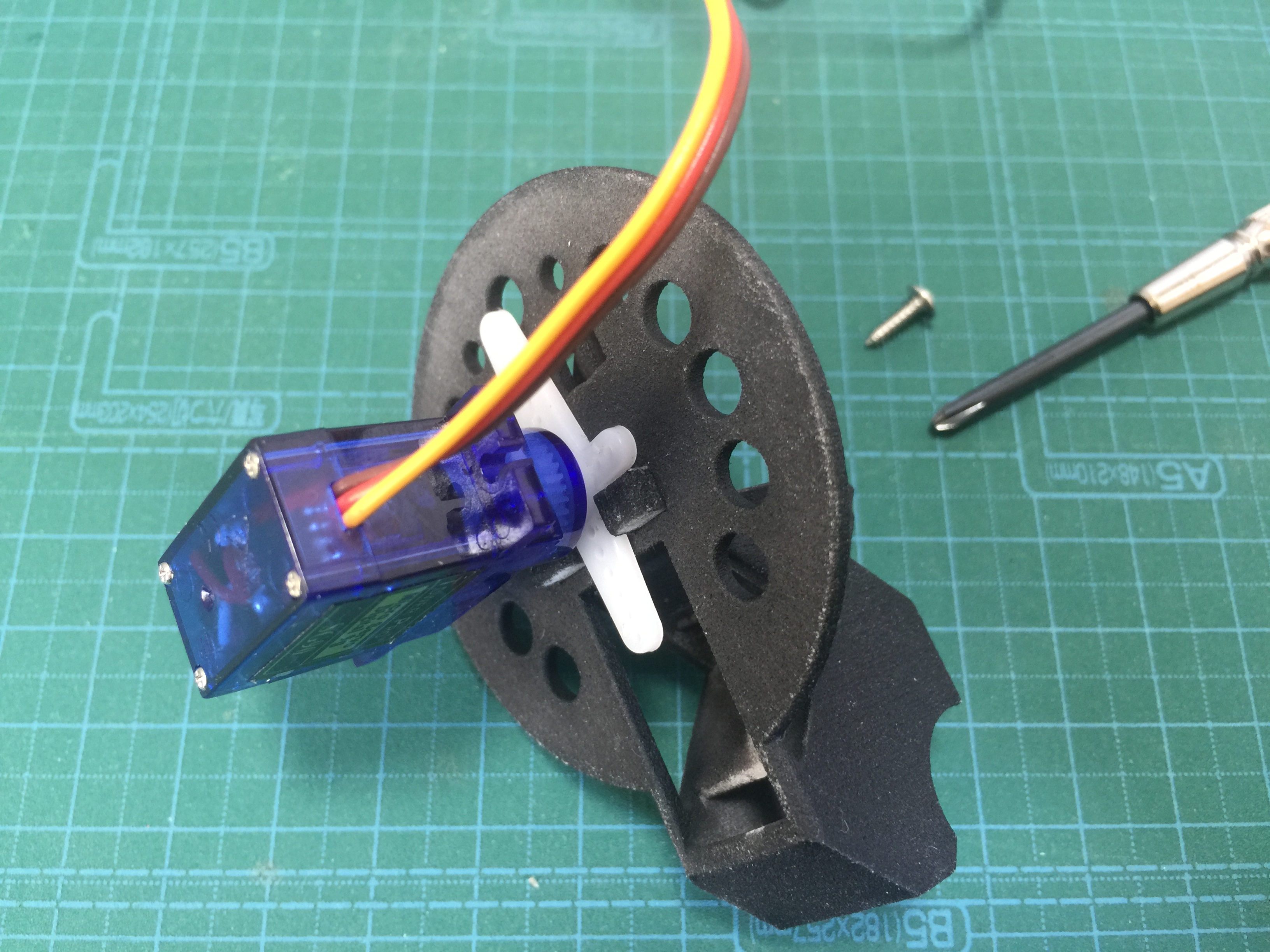
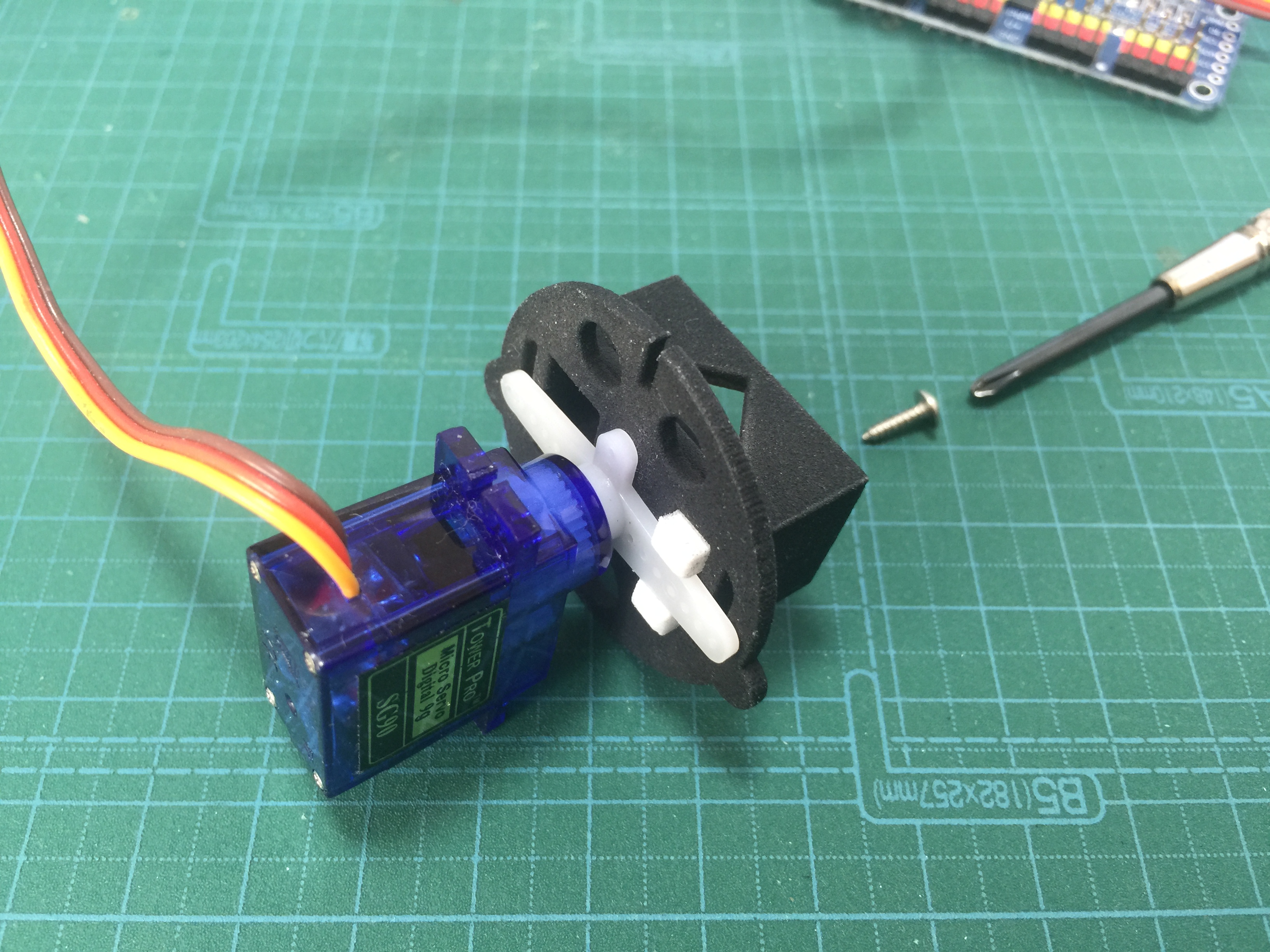
ひとつめのサーボに十字型のサーボホーンをとりつけます。十字型のサーボホーンの2本の長い腕は長さが違います。下の写真で言うと、いちばん長い腕が上向きになるように取り付けてください。
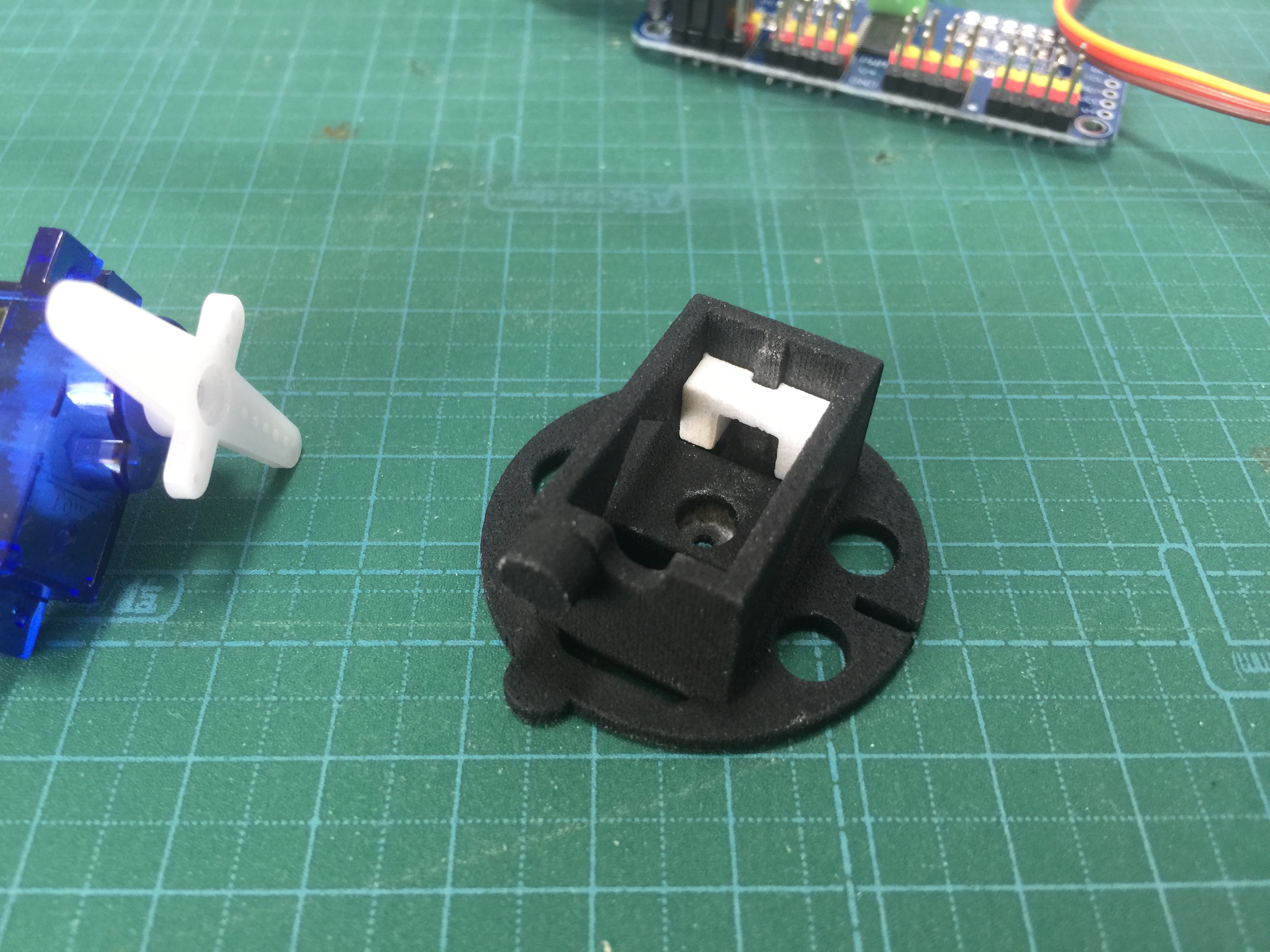
細めのプラスドライバーでサーボをテーブルに固定します。サーボ固定パーツの突起が、サーボホーンを挟み込むようにして固定してください。
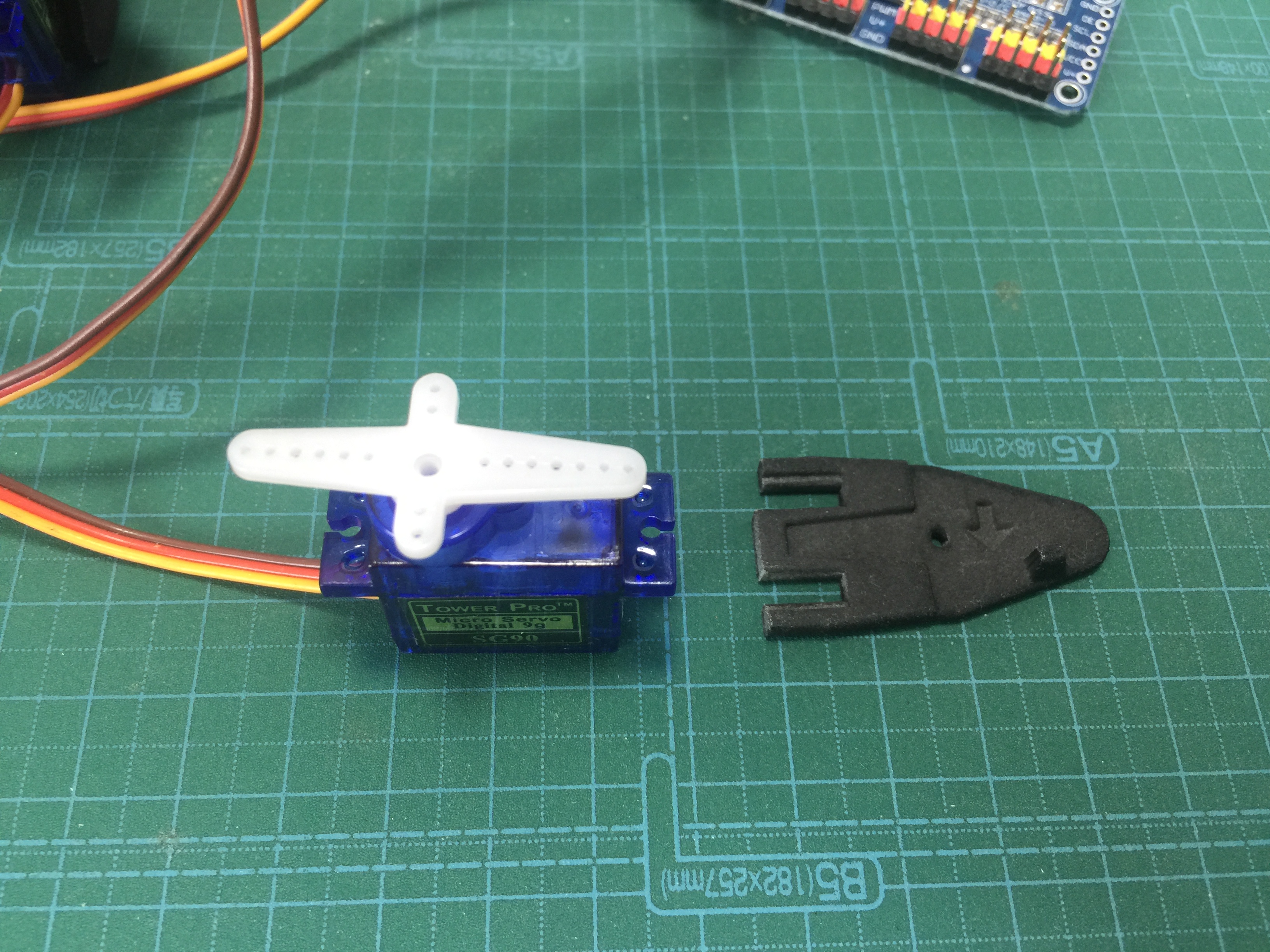
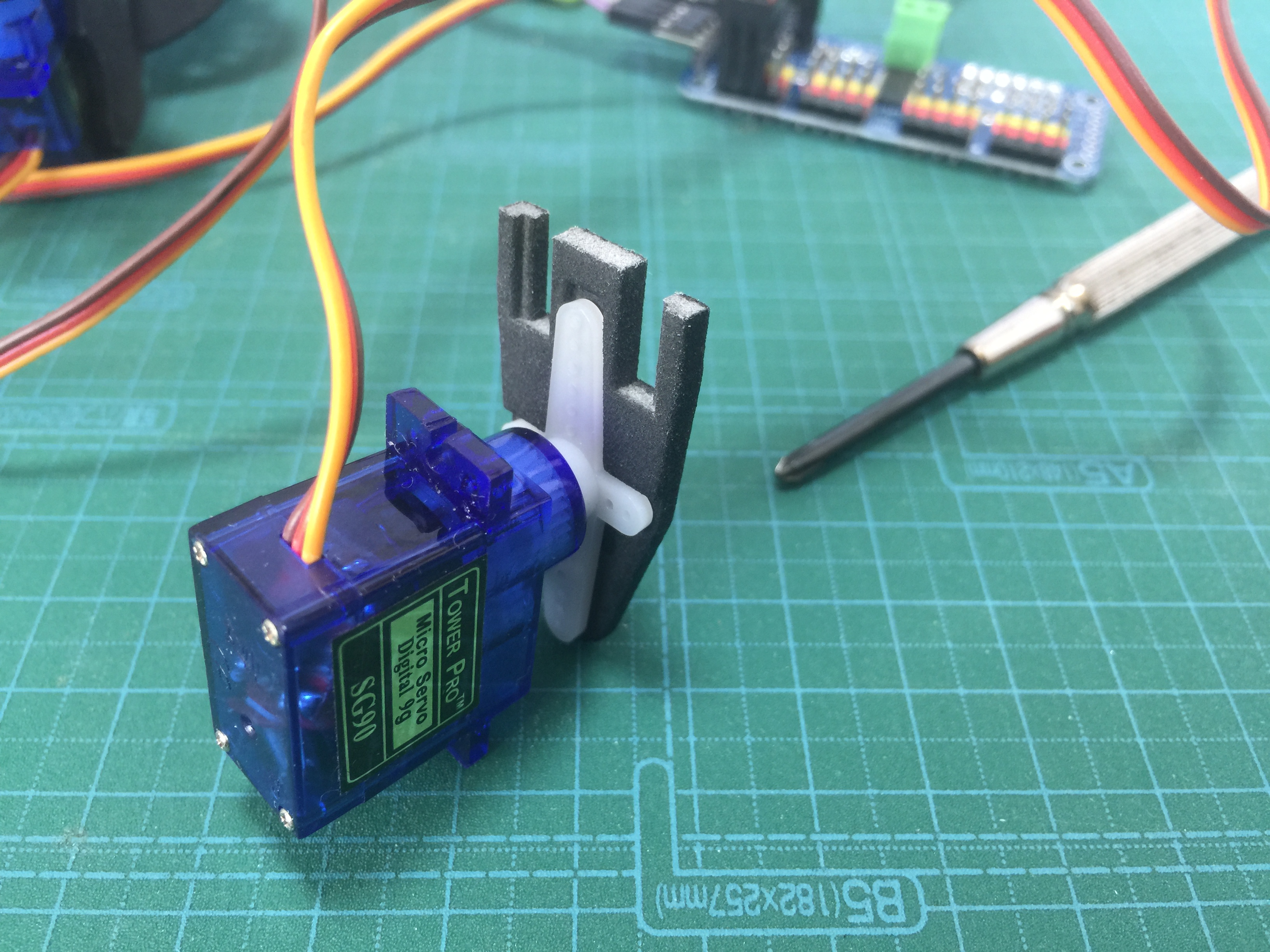
次にジョイントです。白いサーボ固定パーツをジョイントの内側から差し込んでください。サーボ固定パーツには前後があります。溝のあるほうを外側にしないと巧くはまらないはずです。
2つめのサーボにサーボホーンをとりつけてください。下の写真でいうと、いちばん長い腕が左に向くようにとりつけてください。
サーボをネジで固定してください。狭いので難しいと思います。ドライバーをもった手の指先でネジを押さえながら差し込むと巧くいきます。
3つめのサーボにサーボホーンをとりつけてください。下の写真の場合だと、いちばん長い腕を右側に向けて取り付けます。
サーボを左クシパーツにネジ止めしてください。
3つのサーボを合体させてください。
左クシをロボットの後頭部に差し込んでください。続いてテーブルの足首パーツをロボットの足の穴に差し込んでください。サーボに力を加えて回転させると、差し込み安くなります。
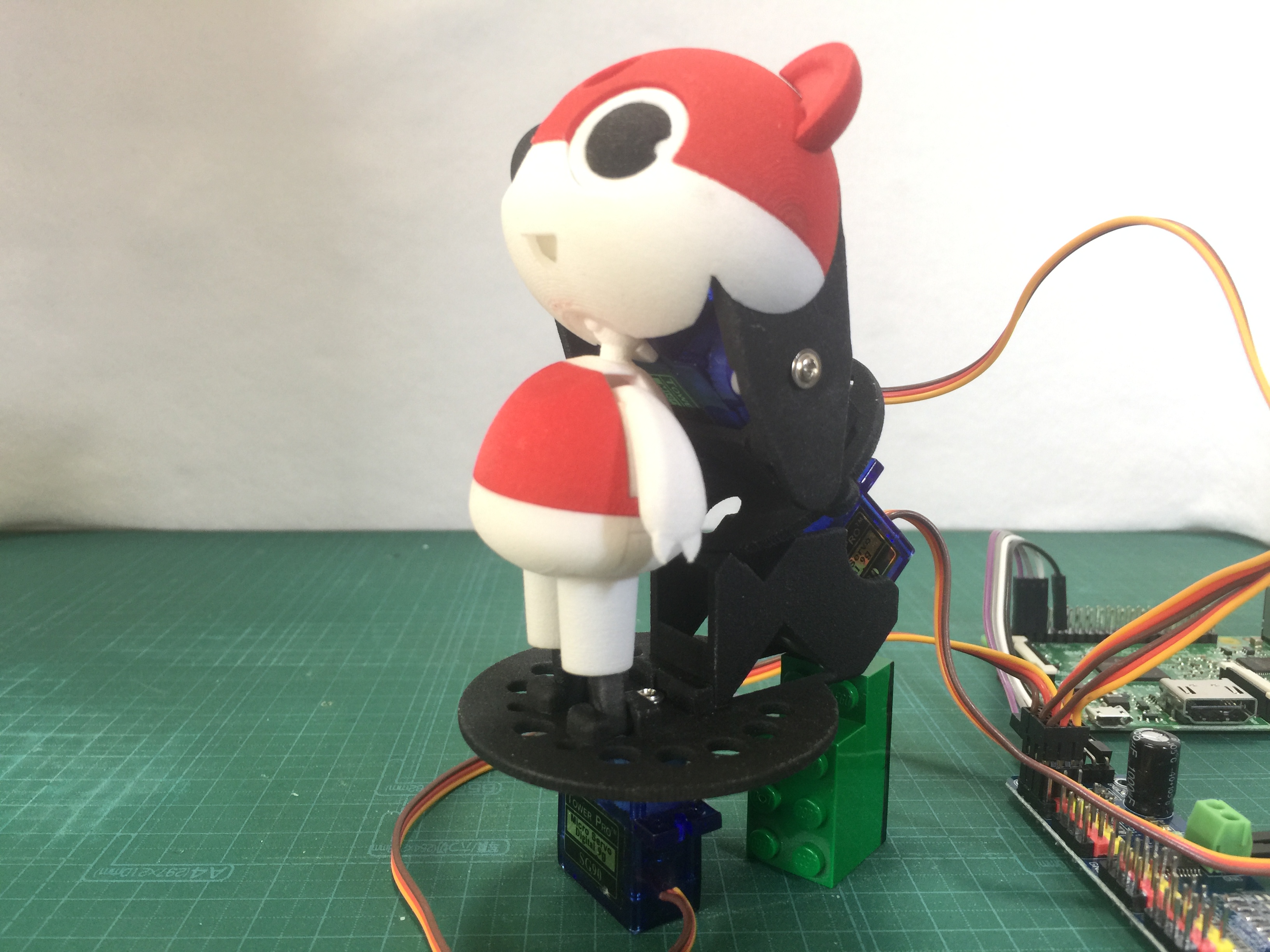
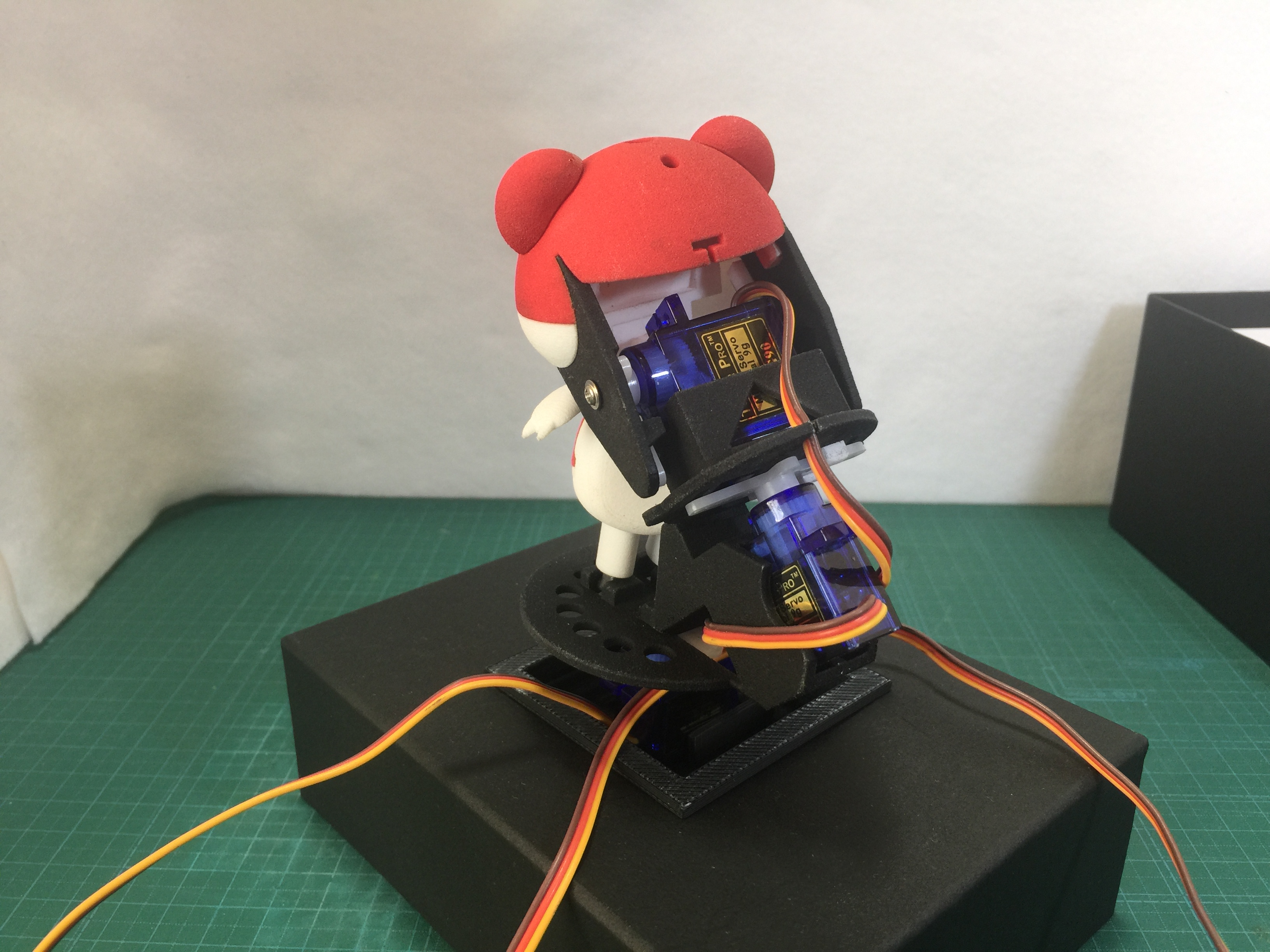
パッケージのフタにロボットを固定しましょう。体の回転サーボのケーブルは、穴から中に落とします。

首の縦振りサーボと首の傾けサーボのケーブルは、テーブルの穴を通して、テーブルの下にくぐらせておきます。ジョイントパーツにはサーボのケーブルを固定するスリットが開いているので利用してください。
サーボのケーブルをサーボドライバボードに接続してください。サーボドライバーボードには16個のコネクタが並んでいますが左端から順に「テーブルを回転させるサーボ(Yaw)」、「首を傾けるサーボ(Rotation)」、「首を縦に振るサーボ(Pitch)」をつなぎます。
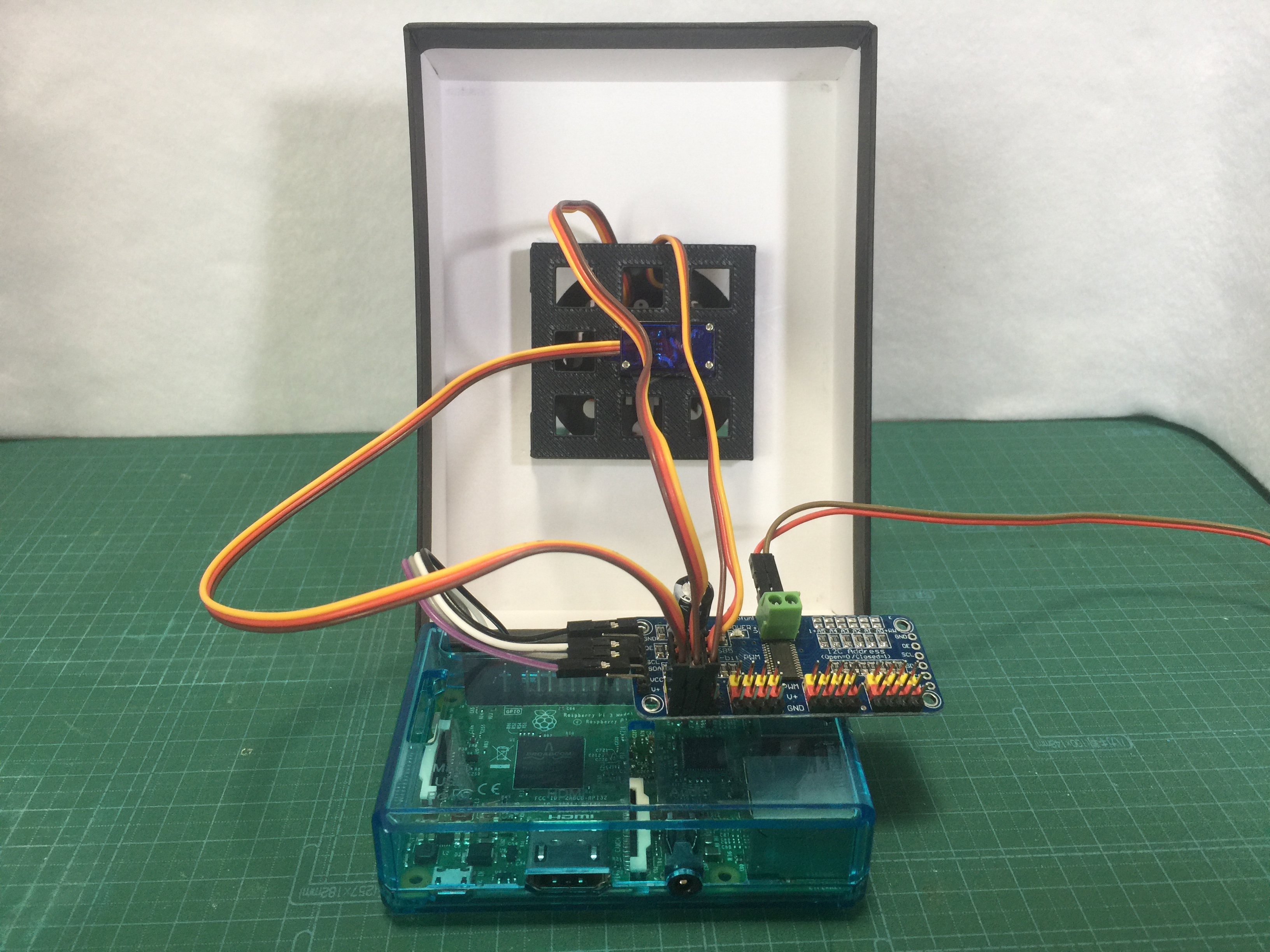
ラズパイの表面は発熱するので、安全のため必ずケースに入れてください。
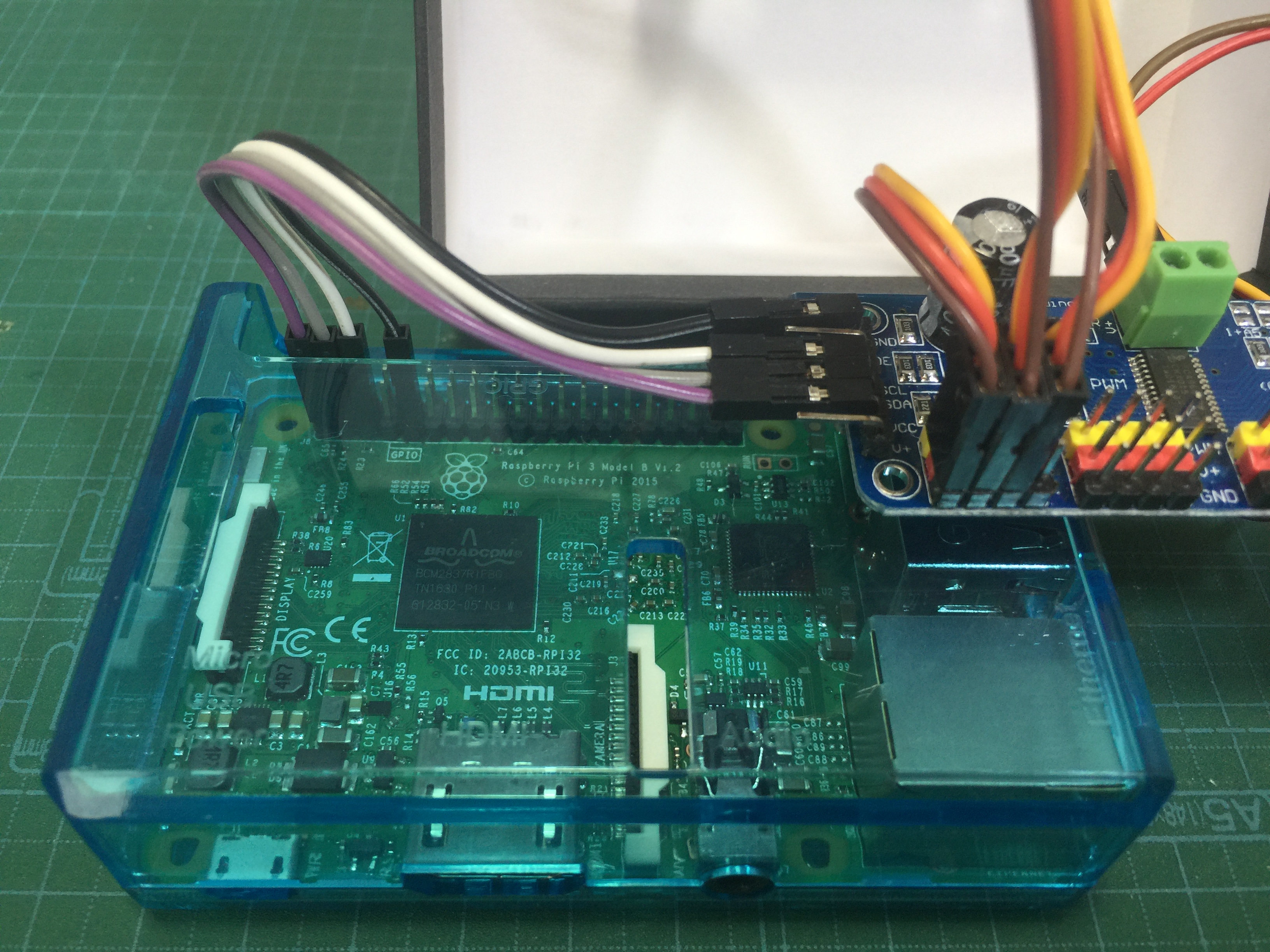
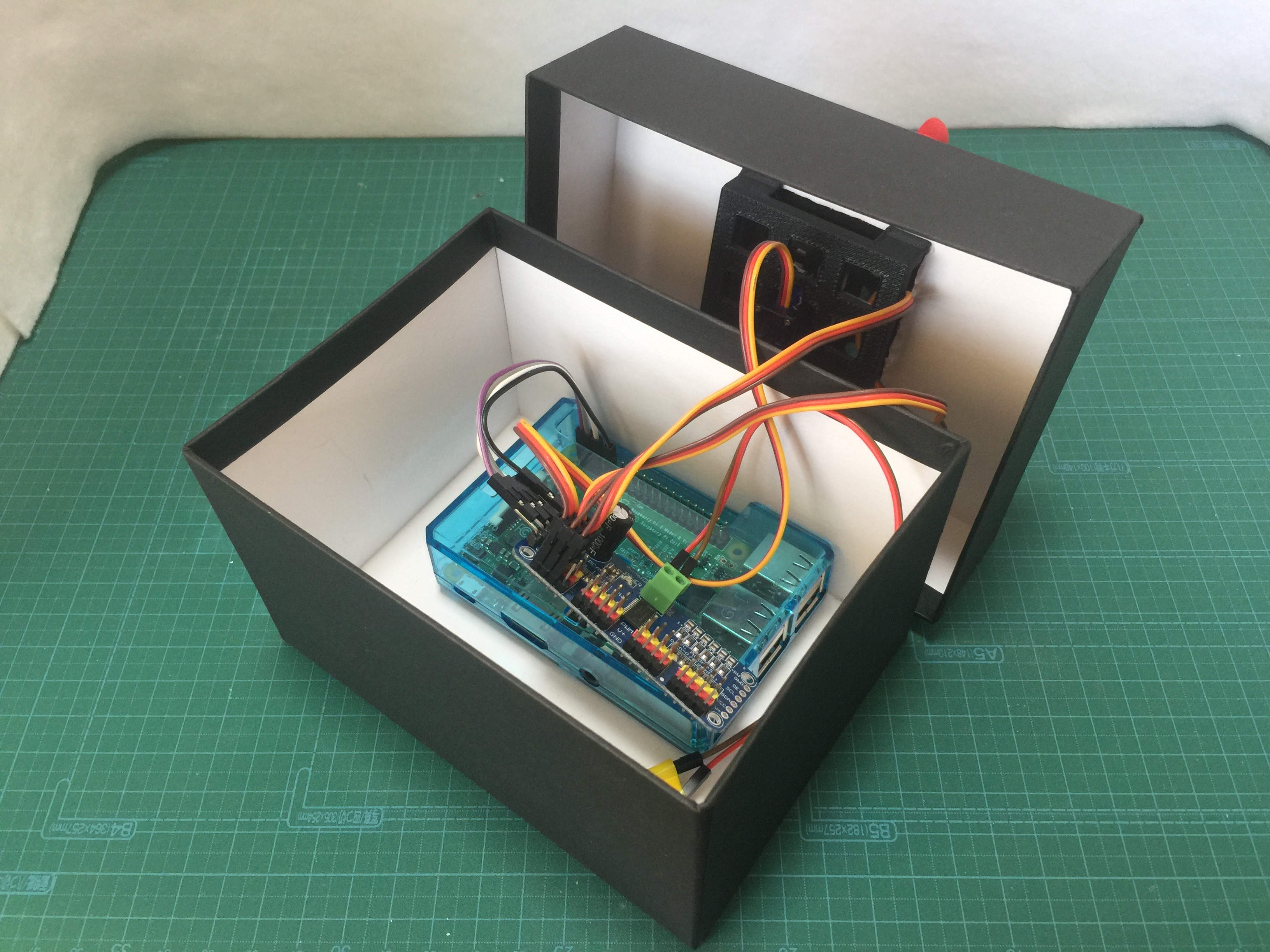
ラズパイとサーボドライバボードを箱の中に入れてみましょう。箱の中でラズパイをどの位置・向きに固定するか考えてください。
箱の表面にはお勧めの穴空け場所が黒いペンで描かれています。これで良ければナイフで穴を空けてください。もちろん別の場所に穴を空けてもよいですし、別の箱を使っても構いません。この箱は厚手なので、切れ味のよいナイフを使い、くれぐれも指を切らないようにご注意ください。
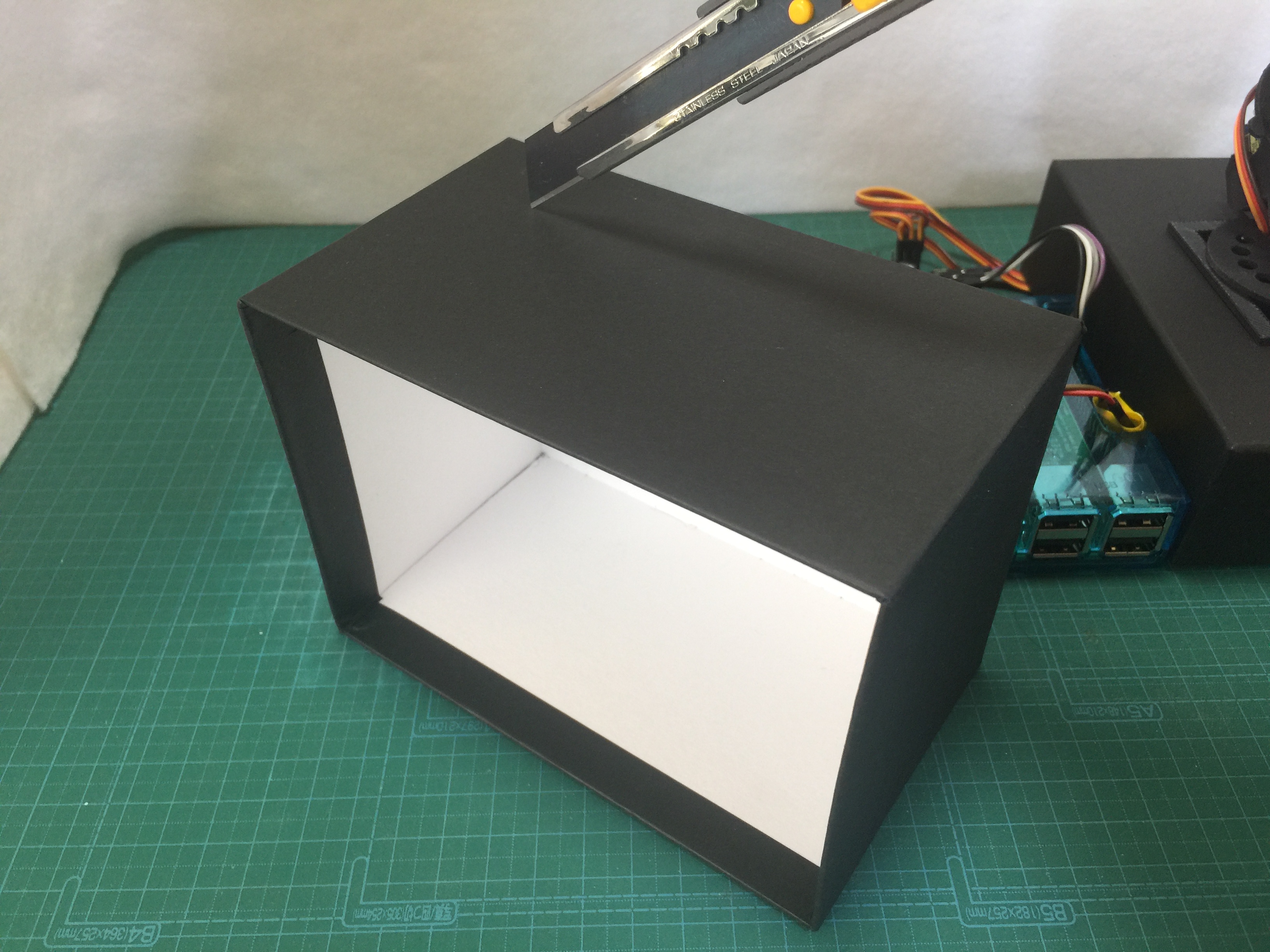
お勧め通りに穴を開けると、こんな感じになります。
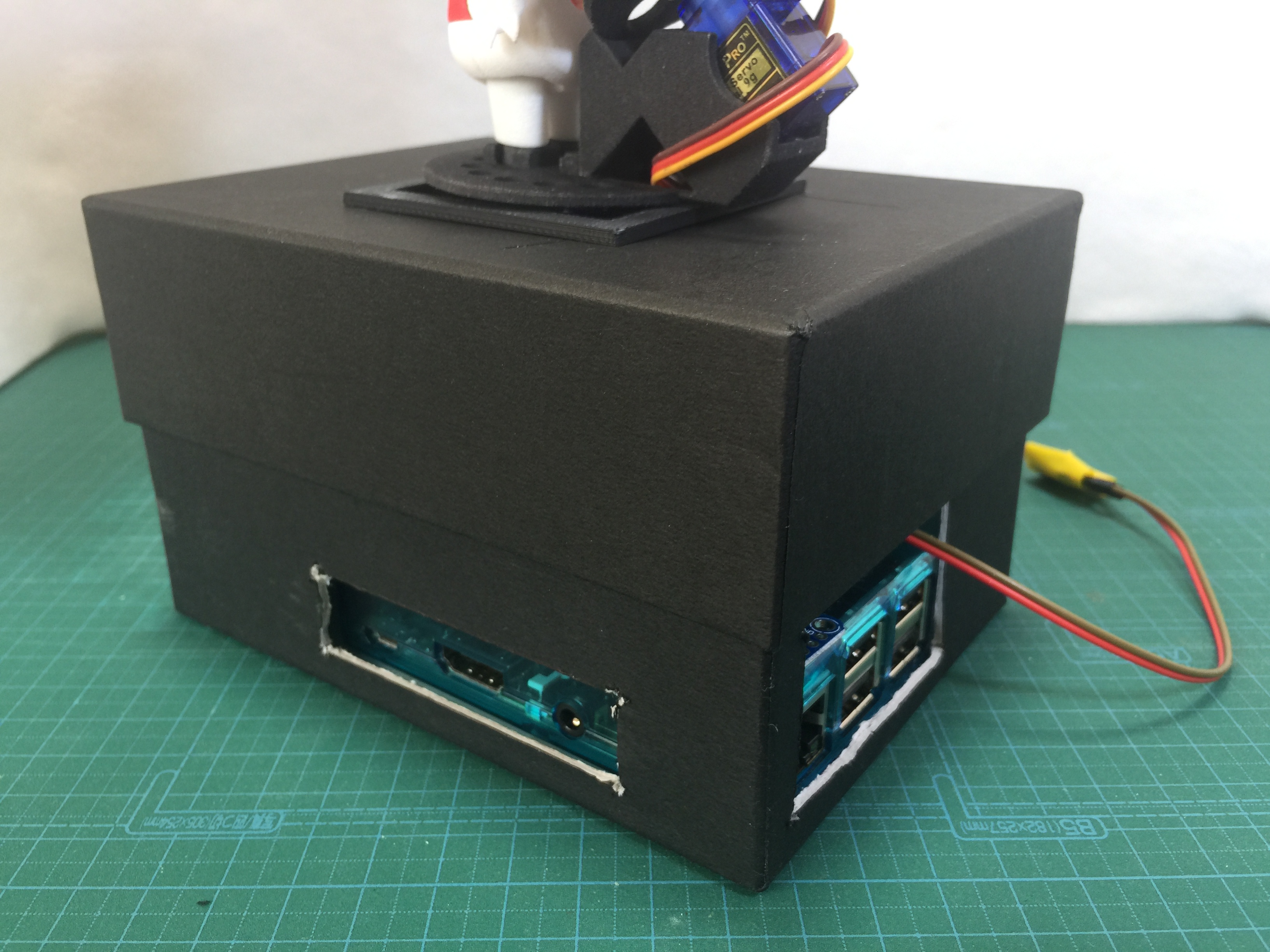
ロボットの組み立てが完了しました。お疲れ様でした。
