・ロボットを組み立てます。
・細めのプラスドライバーをご用意ください。下記の写真のように、サーボとサーボホーン(白い十字型のパーツ)をべゼリーのパーツに固定するときに使います。

・キットからロボットのパーツを取り出してください。

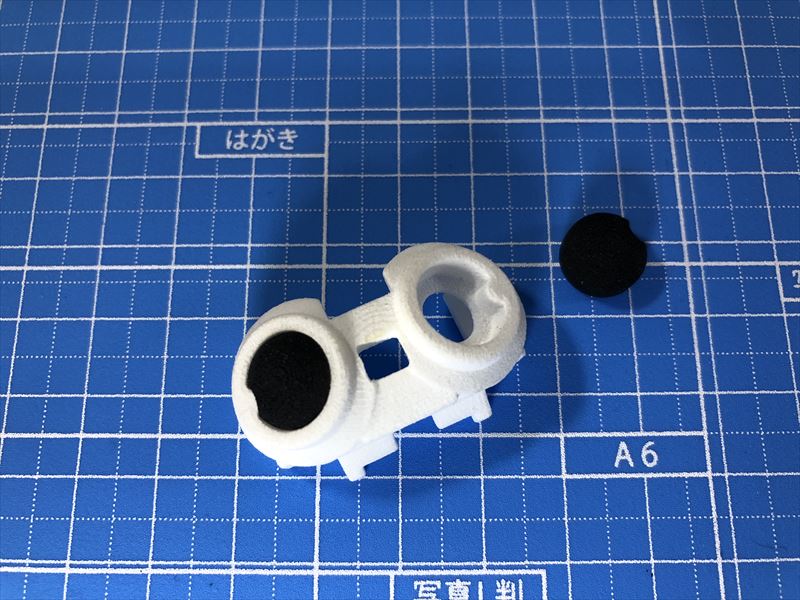
・まずは頭部を組み立てましょう。下記のパーツを選び出してください。

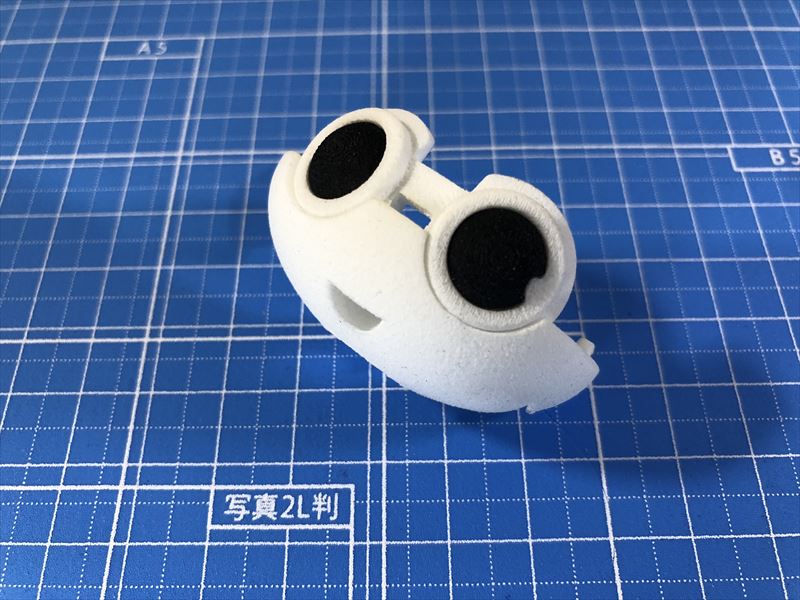
・メガネに目玉をはめこみます。目玉には切り欠きがあり、決まった向きにしかはまりません。斜めになっていると巧くはまらないので、角度を合わせ、垂直にぎゅっと押し込んでください。
・メガネを顔パーツにはめます。鼻のあたりでパチンとはまるようにできています。
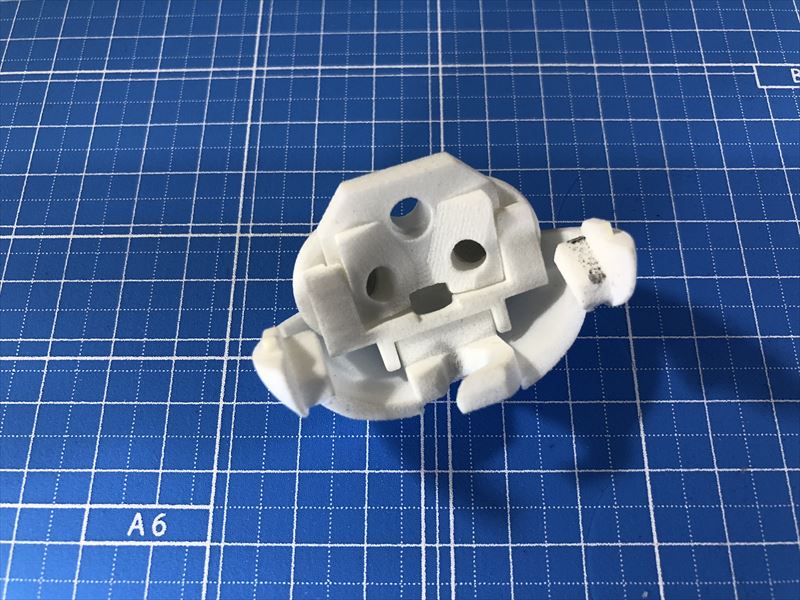
・メガネパーツの上からLED固定パーツを差し込みます。このパーツは額や目をLEDで光らせたいときに使うオプションなので、頭部にカメラを内蔵するときは取り外します。
・顔に頭パーツをとりつけます。これも鼻のあたりでパチンとハマります。
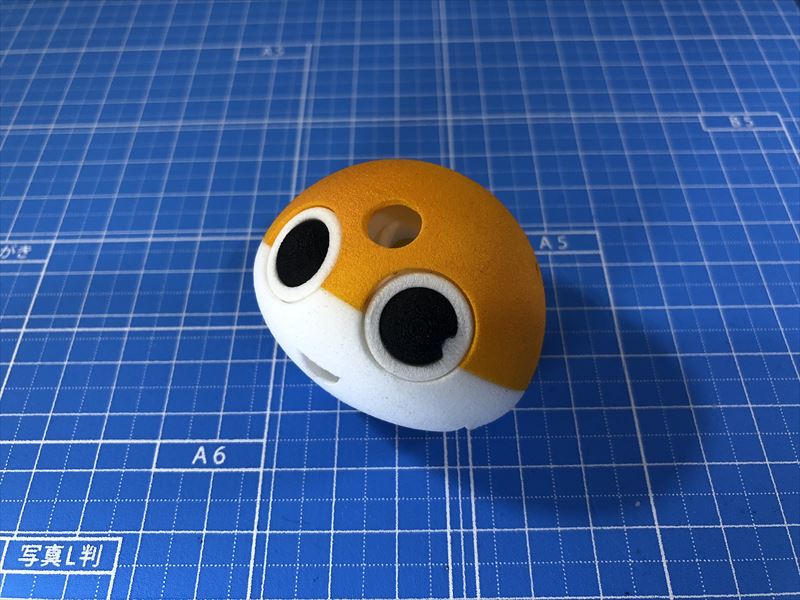
・右櫛(クシ)パーツを後頭部から差し込んで頭と顔を固定します。クシには向きがありますので注意してください。矢印の刻印を内側にして、矢印の向きが上になるように差し込みます。
・これでべゼリーの頭部が完成しました。お好みに合わせて耳パーツもつけてください。

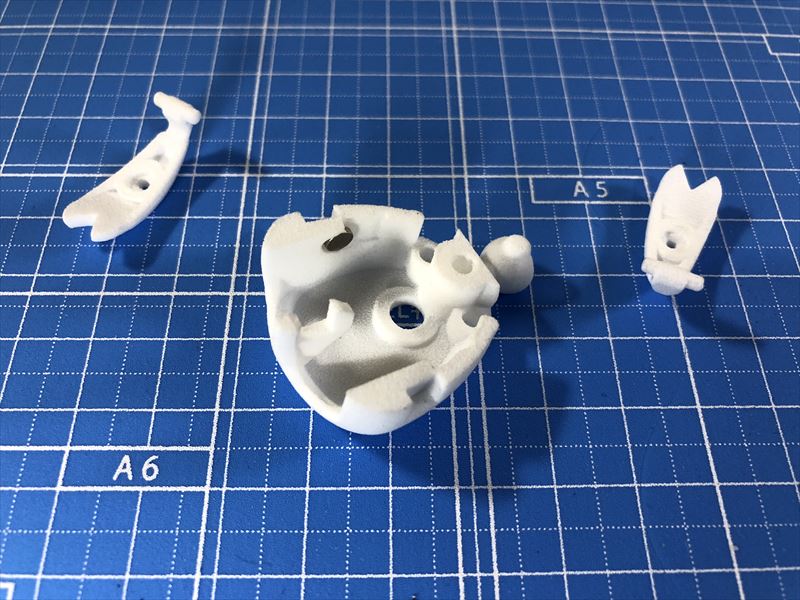
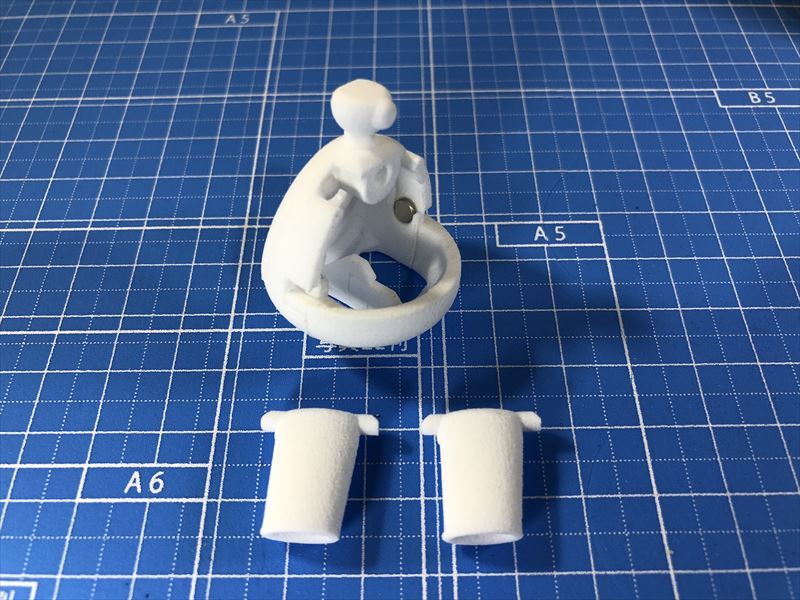
・次にべゼリーの体を組み立てます。下の写真に載っているパーツを集めてください。

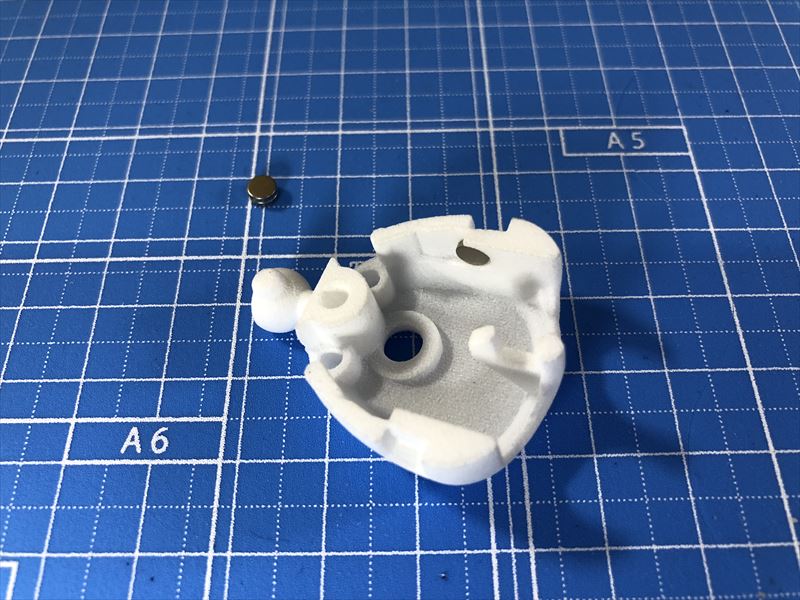
・べゼリーの腕と体を磁力で反発させるため、キットにネオジム磁石が5つ入っています。組み立てに使うのは4つなので、1つはオマケです。ネオジム磁石はとても小さいので、無くさないようにご注意ください。もし無くしてしまったらAmazonなどで直径4mm✕厚さ1mmのものをお求めください。
・まず1つめの磁石を、ボディパーツのお腹の内側の窪みにパチっとはめましょう。細かい作業が苦手なひとにとっては苦行かもしれません。
・2つめの磁石を反対側にパチっとはめます。
・次に3個目の磁石の磁力の向き(どっちの面がくっつくか)を確認するため、あえてボディの外側から磁力でくっつけます。胴体と腕を磁力で反発させたいので、向きを逆にすればよいことがわかります。
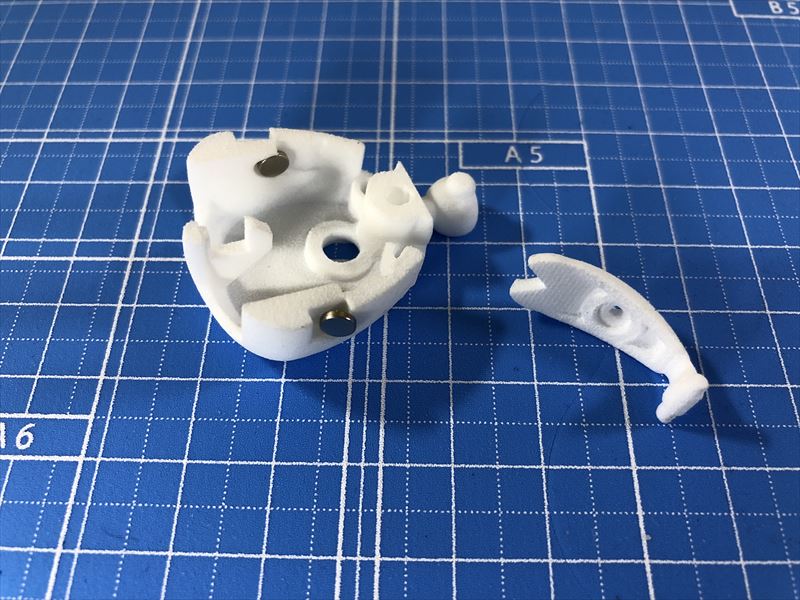
・磁石をひっぺがして向きを変え、腕の内側の窪みにはめます。
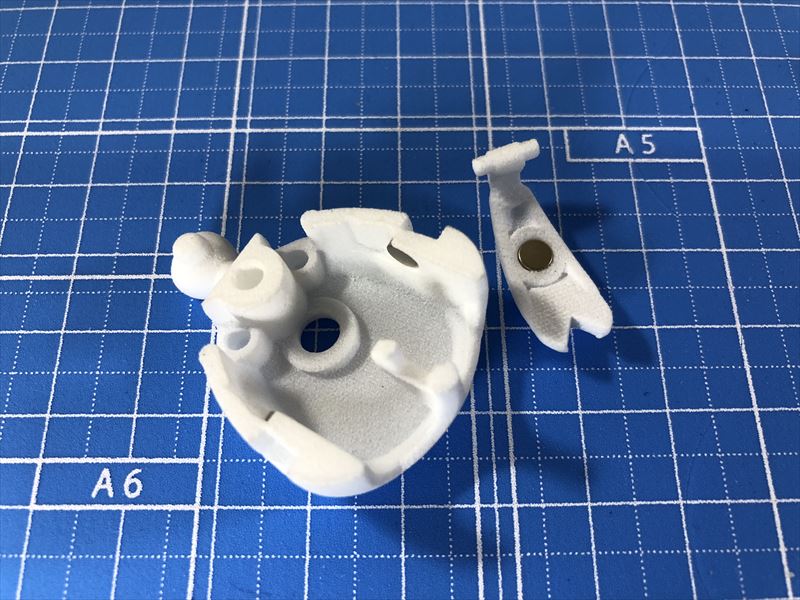
・同様に反対側のボディの外側に4個目の磁石をはりつけて、磁力の向きを確認します。
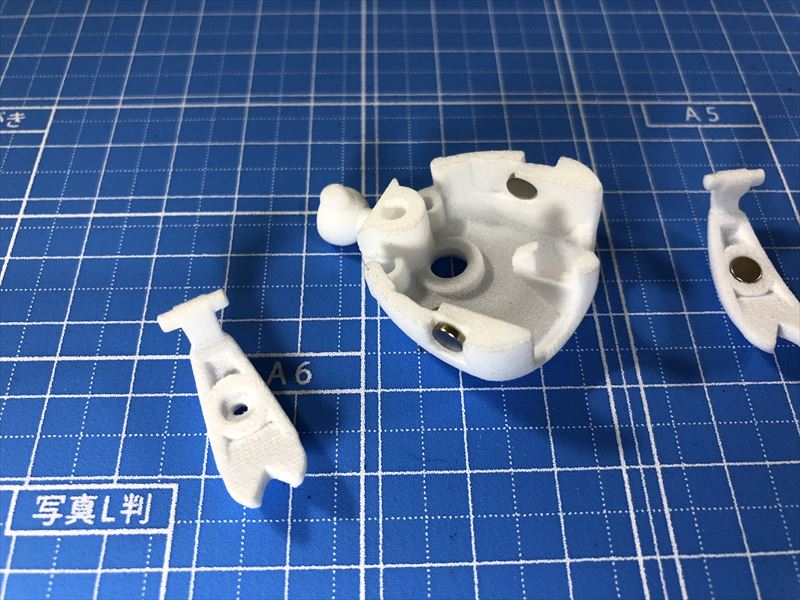
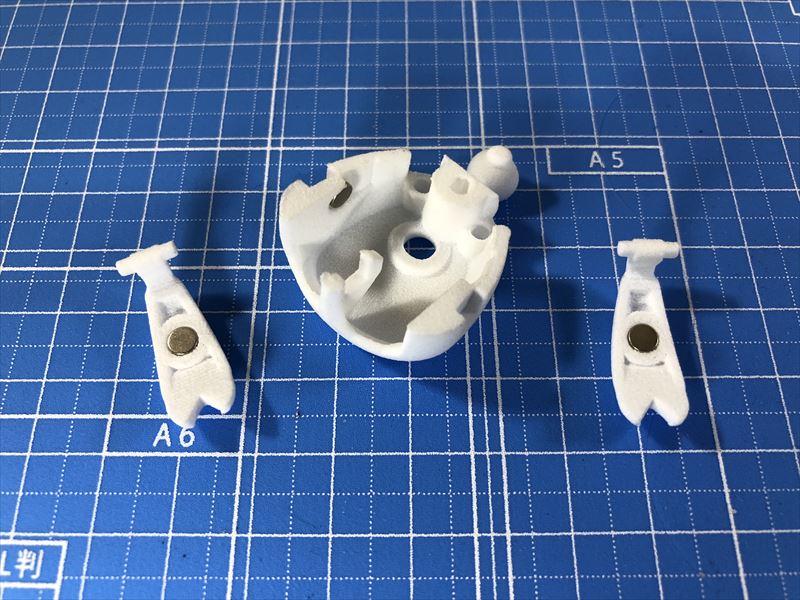
・やはりひっぺがして反対向きにして腕の内側の窪みにはめ込みます。横腹と腕の磁石が反発する向きについているかどうか、いちおう確認してみましょう。
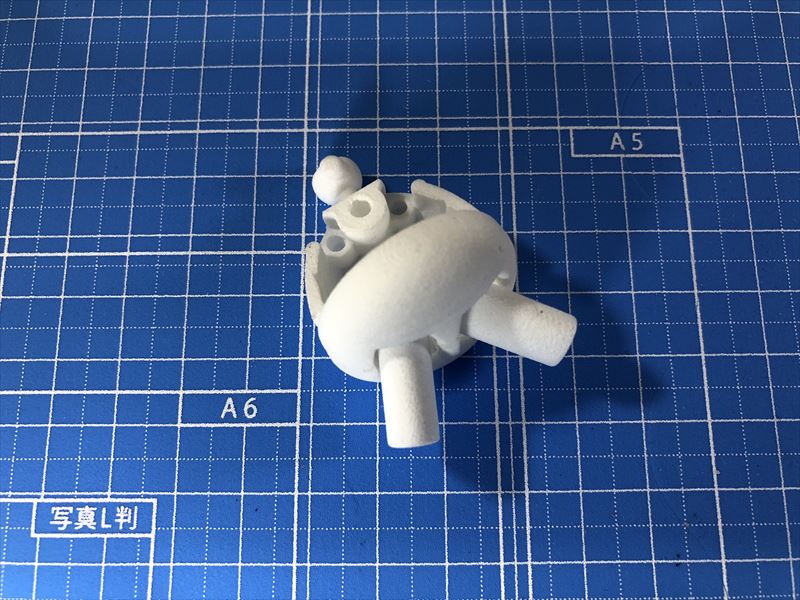
・腹パーツと足パーツ✕2を取り出してください。
 ・足には前後の向きがあるので注意してください。平らな方が後ろで、斜めになっているほうが前です。
・足には前後の向きがあるので注意してください。平らな方が後ろで、斜めになっているほうが前です。

・背中パーツに腹パーツをハメたあと、穴に足パーツを落とします。
・背中パーツを寝かせ、肩の穴に腕パーツの回転軸を入れてください。腕パーツには前後はなく、左右も同じです。
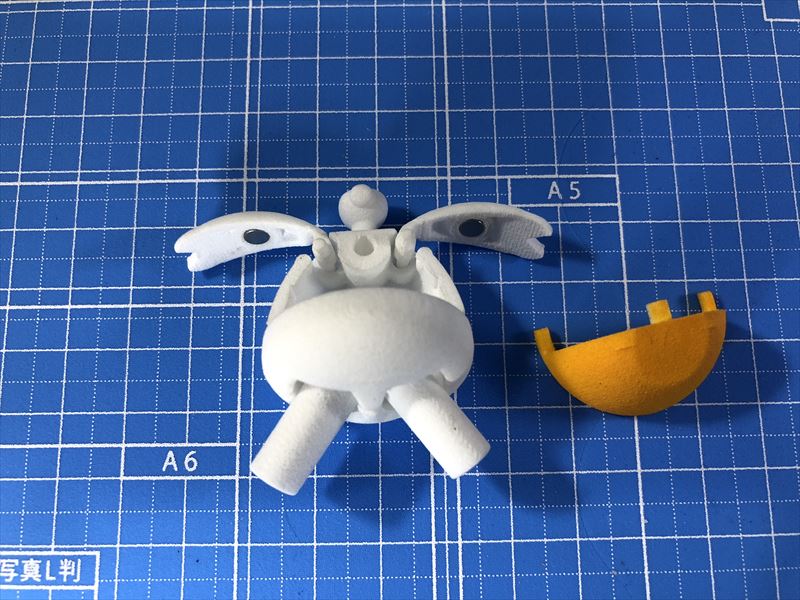
・胸パーツをハメてください。肩の関節がちゃんとハマっているかどうか、肩を動かして確認してみましょう。
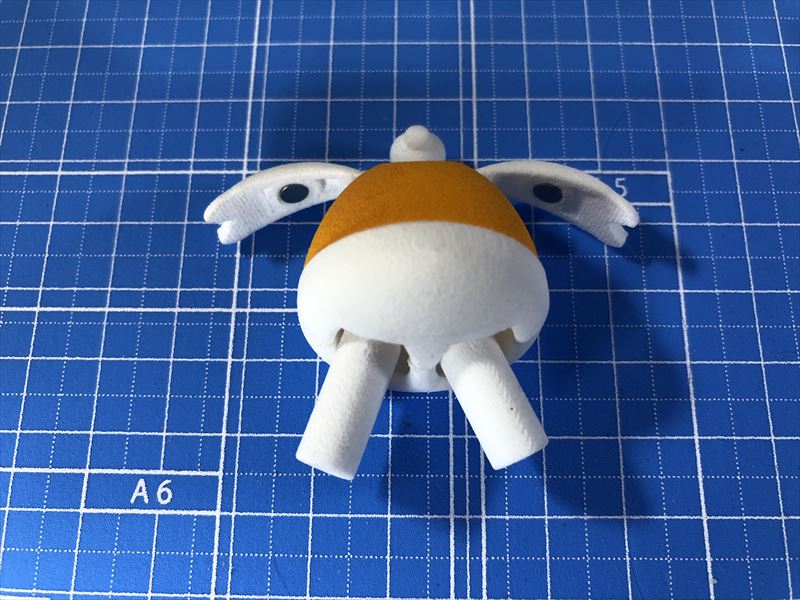
・磁石が反発することで腕がふわふわ浮いていることを確認してください。
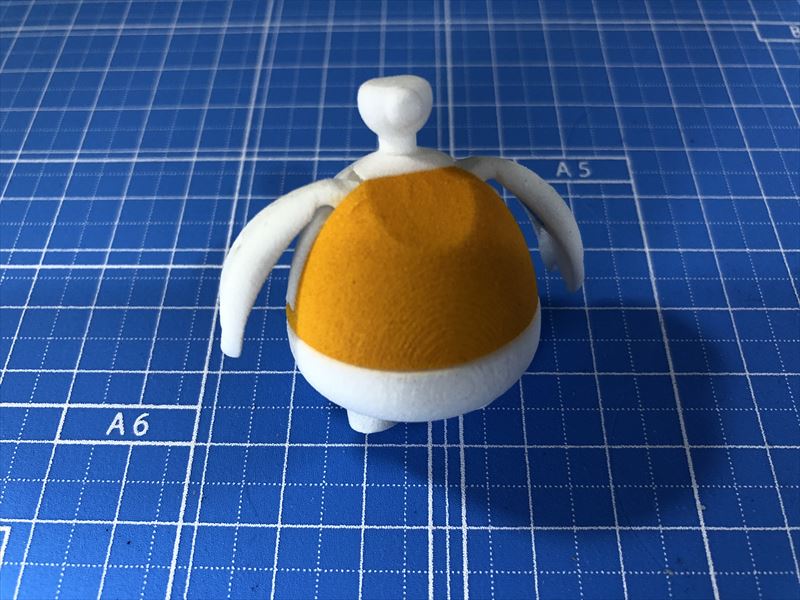
・それでは頭と体を合体させましょう。

・頭部の斜め後ろから、首を斜めに差し込みます。

・体を回転させて正面を向かせると、体が頭部からぶらさがった形になります。

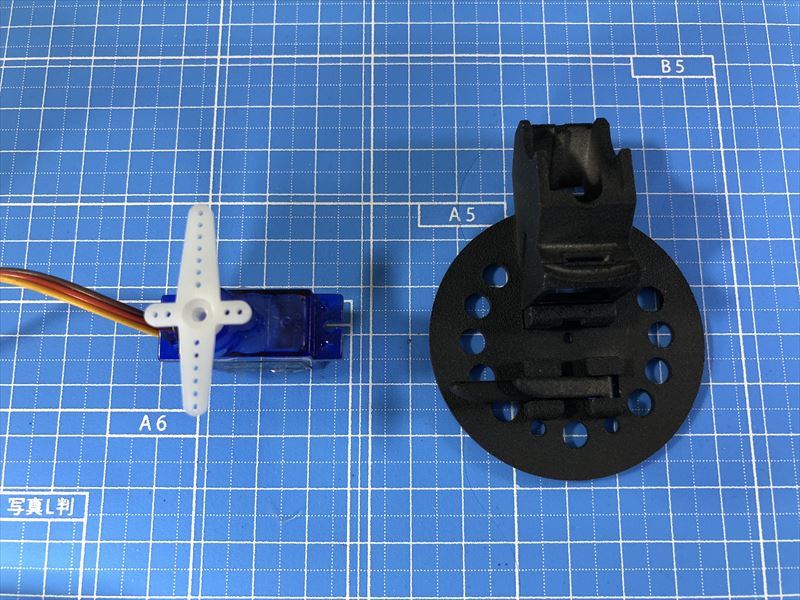
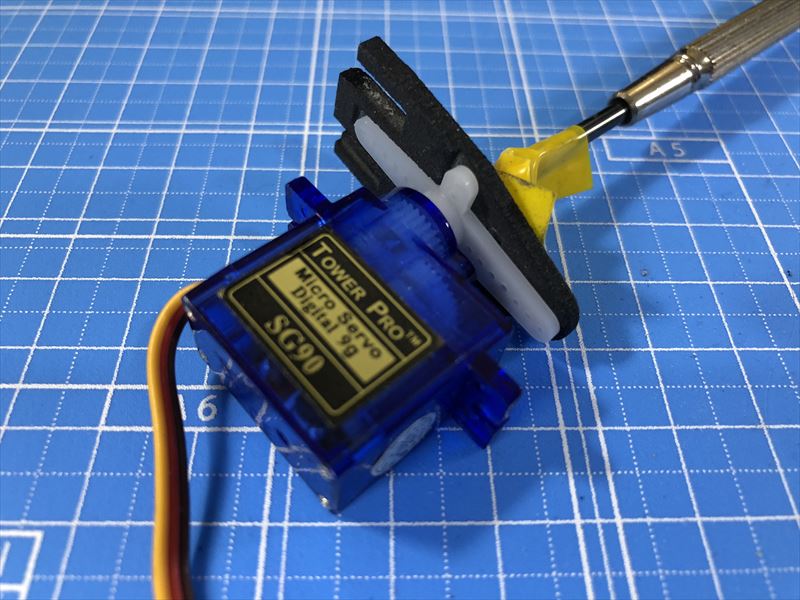
・次に、ロボットを動かすスタンドを作ります。サーボを3つ用意してください。センタリングしないと気持ち悪いというひとはセンタリングしてください。センタリングって何?というひとは、気にせず先に進みましょう。

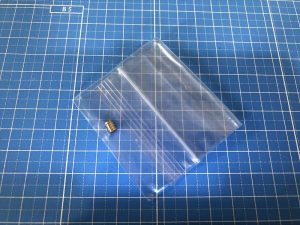
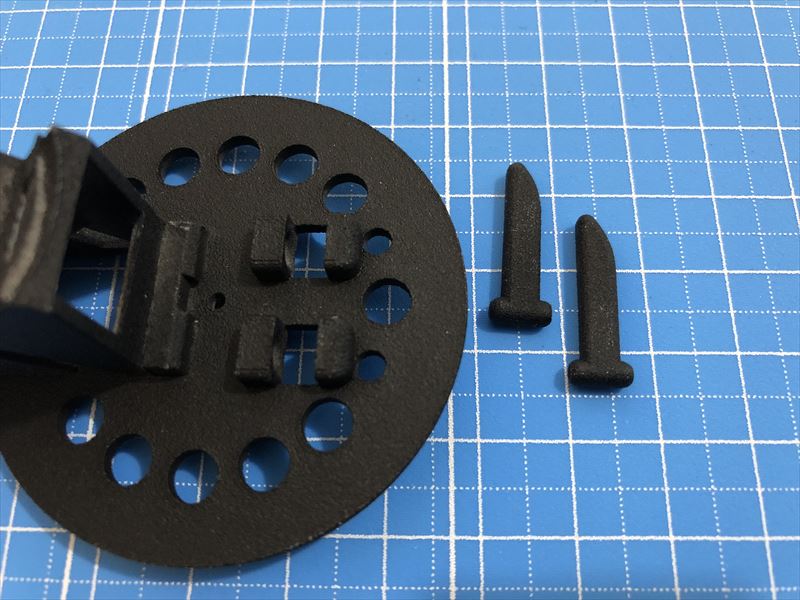
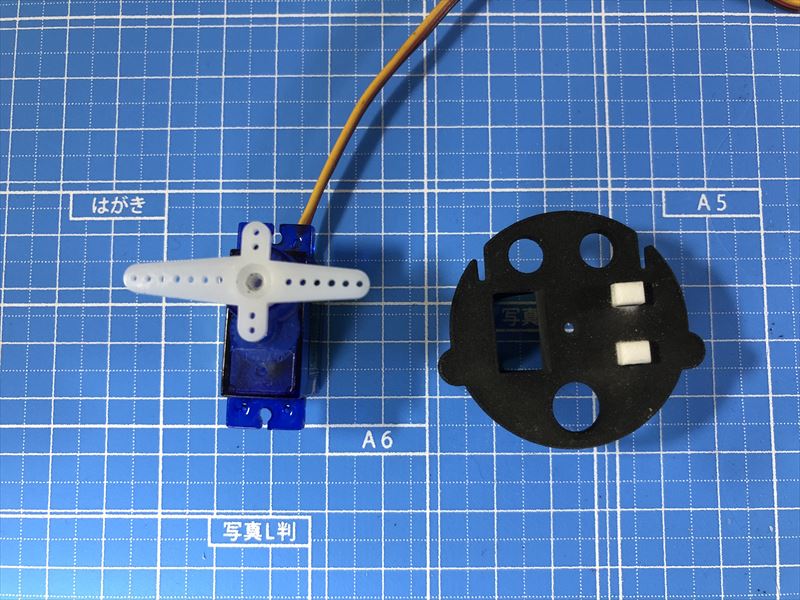
・ちなみに各サーボに付属している部品のうち使うのは下の写真の左側。つまり長いネジ1本と十字型のサーボホーン(白いプラスチックのパーツ)だけです。下の写真の右側に映っている部品は使いません。

・スタンドのパーツを取り出してください。

・まずはステージに2つの足首パーツを取り付けます。足首パーツは2つとも同じ形ですが、前後があるのでご注意ください。上端が斜めにカットされている方向を前に向けます。
・指で足首パーツをもってひねりながら押し込めばはまりますが、指の力が弱いひとはペンチを使ってください。

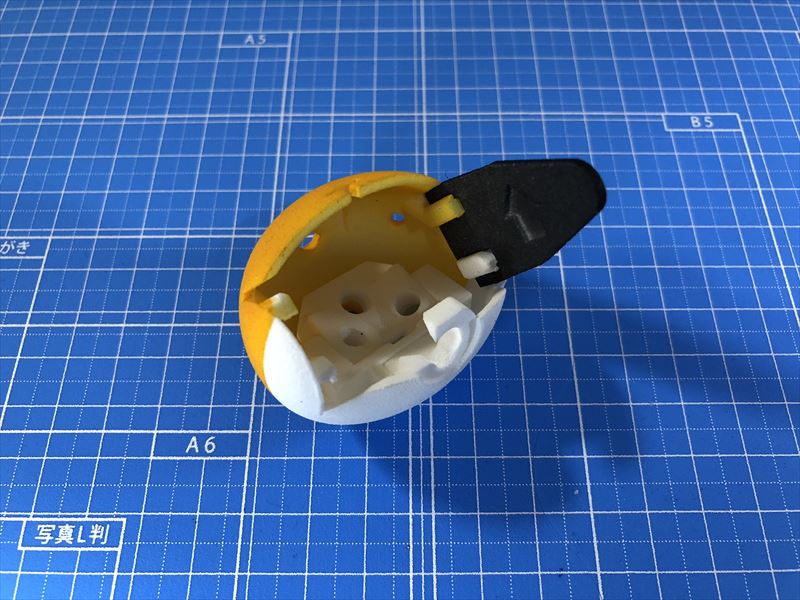
・ステージに黒いサーボ固定パーツを差し込んでください。サーボ固定パーツには前後があります。窪みがあるほうを前方にしてください。
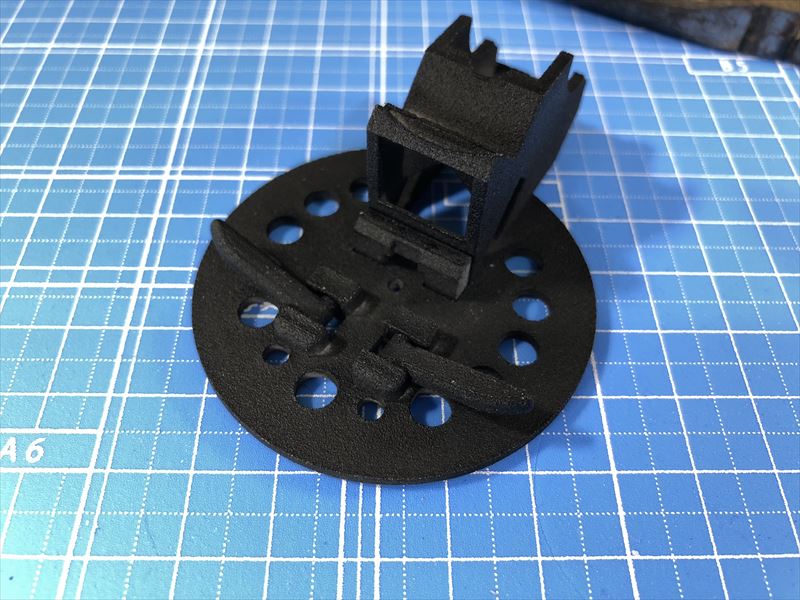
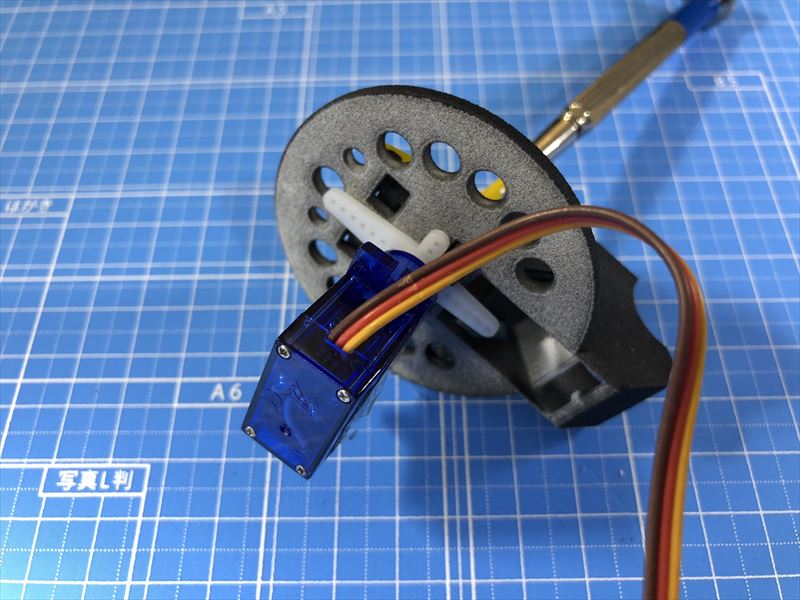
・ひとつめのサーボに十字型のサーボホーンをとりつけます。十字型のサーボホーンの2本の長い腕は長さがちょっと違います。下の写真で言うと、いちばん長い腕が上向きになるように取り付けてください。
・細めのプラスドライバーでサーボをステージにネジ留めします。サーボ固定パーツの突起が、サーボホーンを挟み込むようにして固定してください。
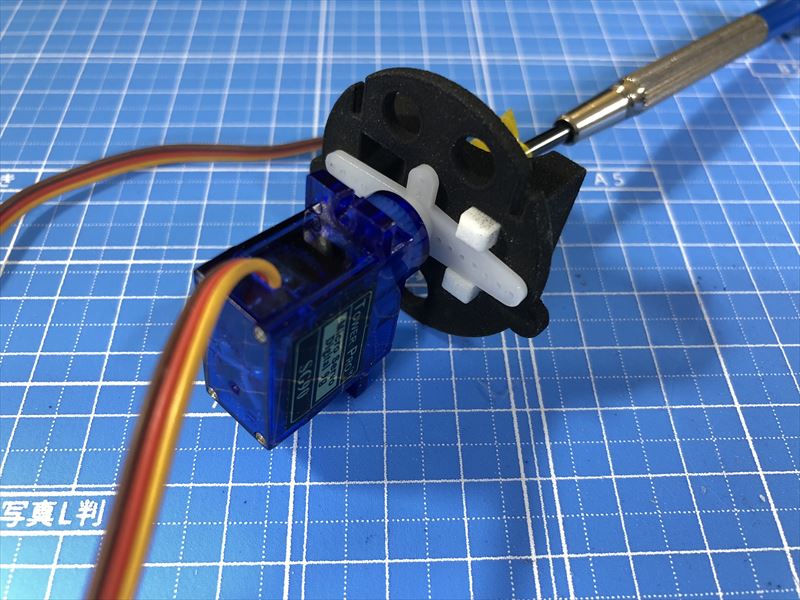
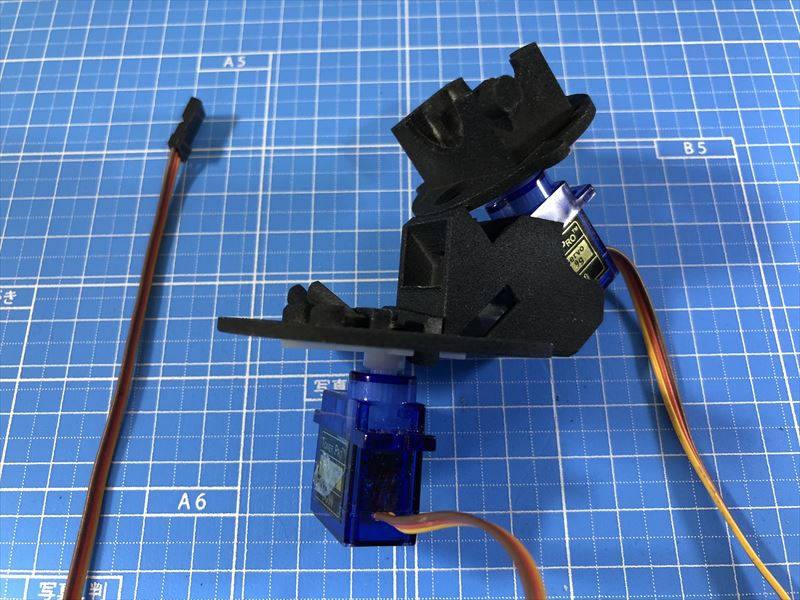
・次にジョイントパーツを取り出してください。白いサーボ固定パーツをジョイントの内側から差し込んでください。サーボ固定パーツには前後があります。溝のあるほうを外側にしないと巧くはまらないはずです。指の力が弱いひとは、硬いものをつかって押し込んでみてください。

・2つめのサーボにサーボホーンをとりつけます。下の写真でいうと、いちばん長い腕が左に向くようにとりつけてください。
・サーボをネジで固定してください。狭いのでネジを穴に差し込むのが難しいと思います。ドライバーをもった手の指先でネジを押さえながら差し込むと巧くいきます。
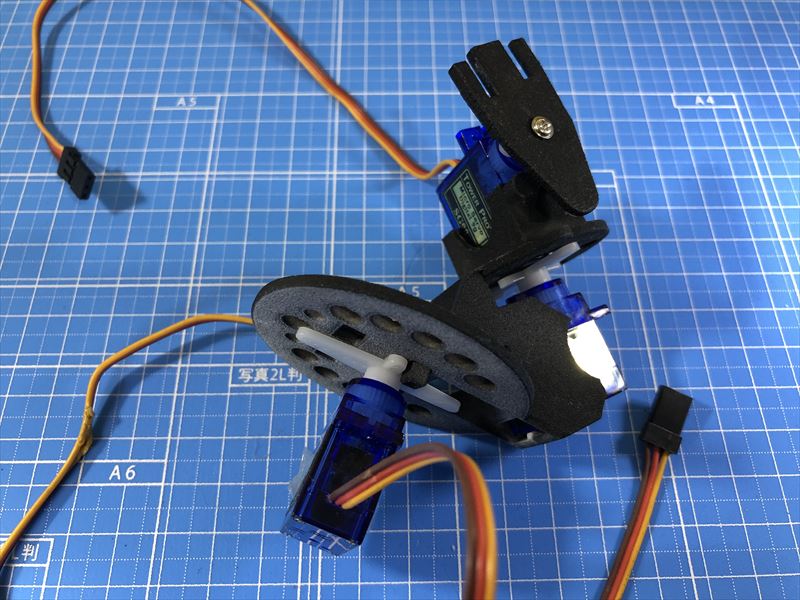
・3つめのサーボにサーボホーンをとりつけてください。下の写真を参考にして、いちばん長い腕を右側に向けて取り付けます。
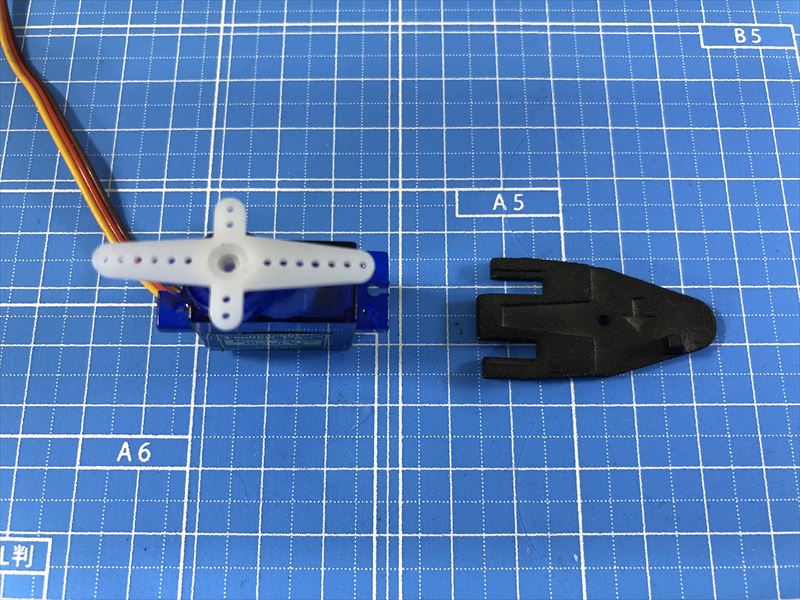
・サーボを左クシパーツにネジ止めしてください。
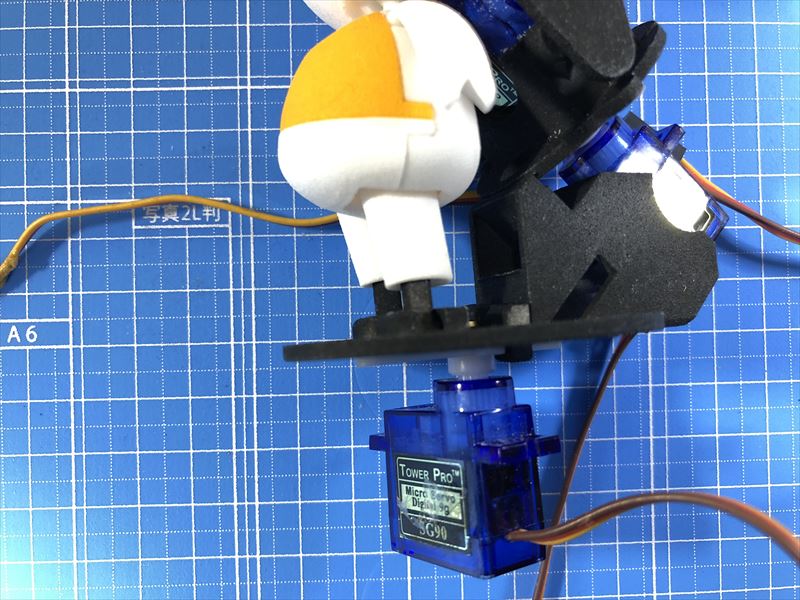
・ジョイントのサーボをステージに差し込んで合体させてください。
・さらに左クシのついたサーボをジョイントに差し込んで合体させます。
・左クシをロボットの後頭部に差し込んでください。
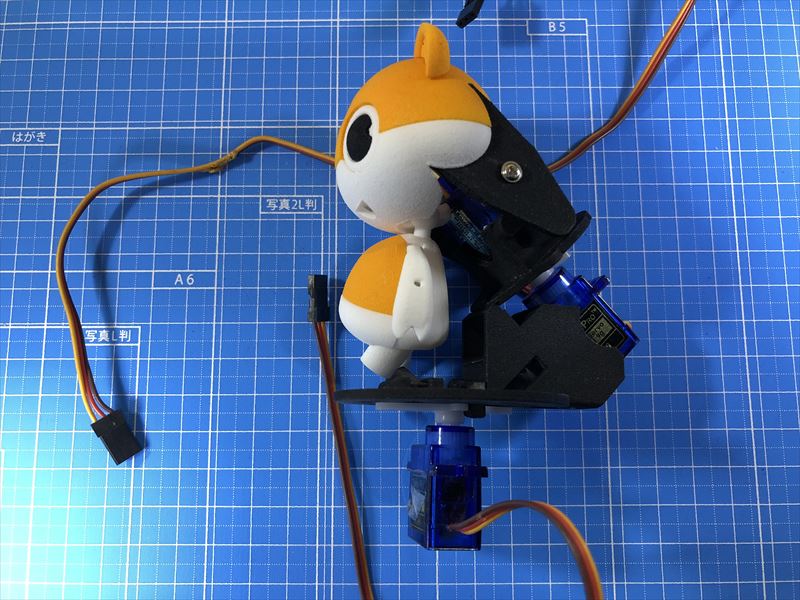
・続いてテーブルの足首パーツをロボットの足の穴に差し込んでください。ロボットを上に向かせると差し込み易くなります。
・ロボットの組み立てが完了しました。お疲れ様でした。
