まず最初にサーボモータのセンタリング(中心合わせ)をします。
いきなり面倒くさい作業ですが、これをやっておかないと、ロボットの初期姿勢が傾いてしまったりします。
まずは機材を用意しましょう。
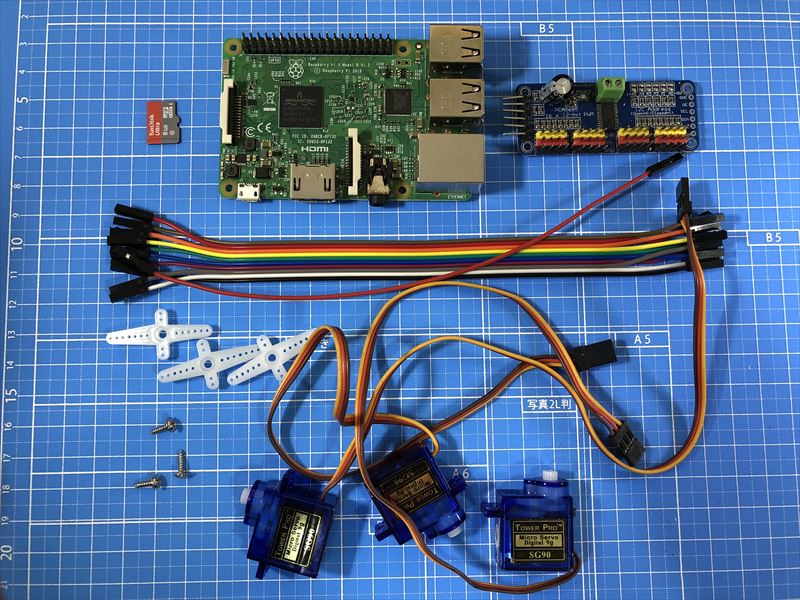
・ラズパイ、SDカード、サーボドライバーボード、ジャンパーケーブル、サーボ3つを用意してください。
・サーボドライバーボードにジャンパーケーブルをつなぐため、細めのマイナスドライバーも必要です。
機材を接続しましょう。
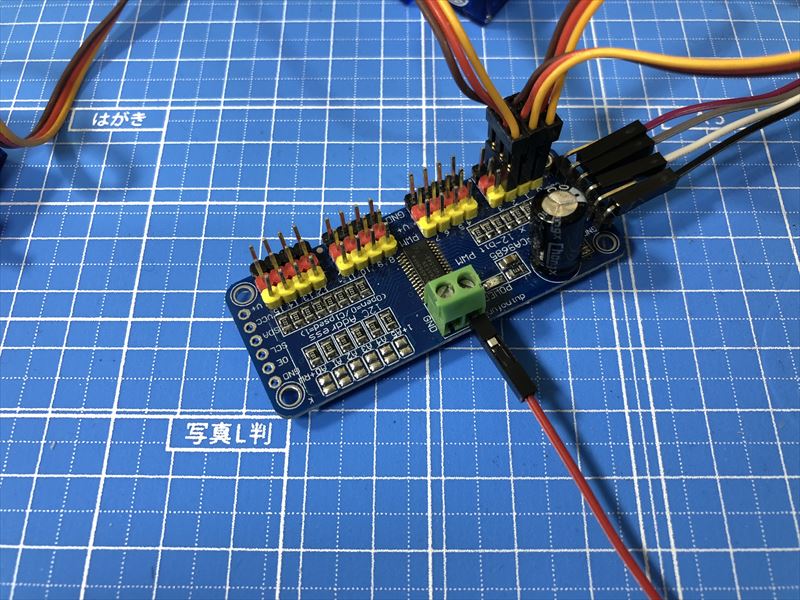
・まず3つのサーボをサーボドライバボードに接続してください。
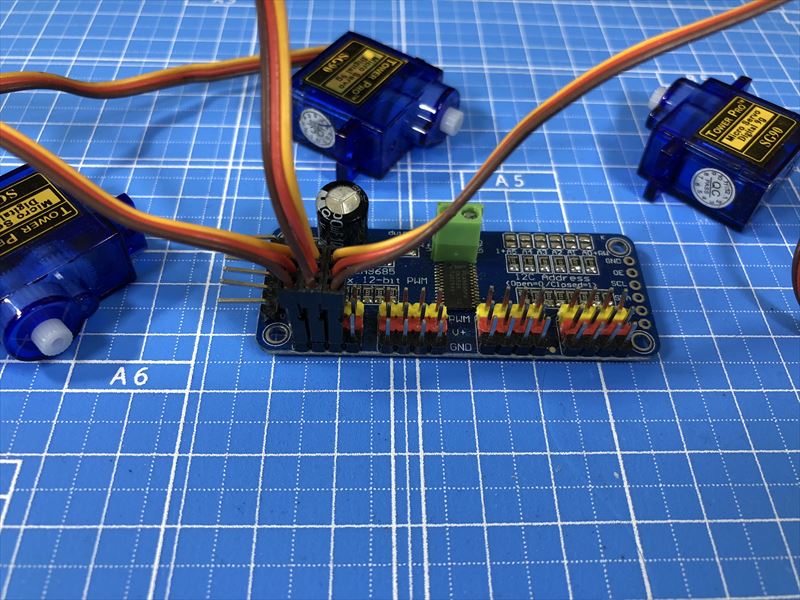
・サーボドライバボードにはサーボを16個刺すことができますが、左端の3つに刺してください。
・ケーブルの色と端子の色が合うように刺してください。橙ケーブル→黄端子、赤ケーブル→赤端子、茶ケーブル→黒端子。
・キットに付属している「メス-メス」ジャンパーケーブルは10本がつながってますが、4本だけ割いてください。何色を使ってもよいのですが、このマニュアルでは黒から紫の4本を使っているので、同じ色のほうが分かりやすいですね。
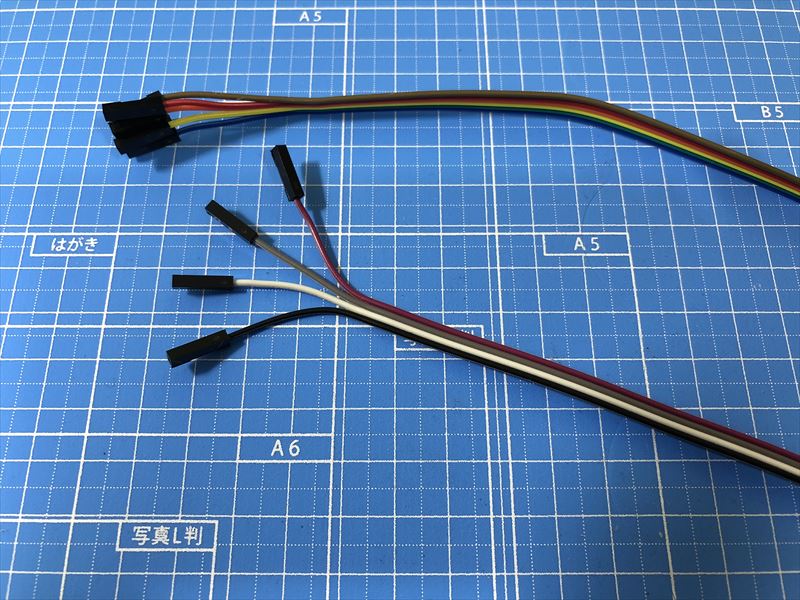
・ジャンパーケーブルをサーボドライバボードに接続してください。ボードには6本の端子がありますが、そのうち4本だけ使います。ちなみに紫と黒が電源(紫がプラスで黒がマイナス)、灰と白が信号線です。
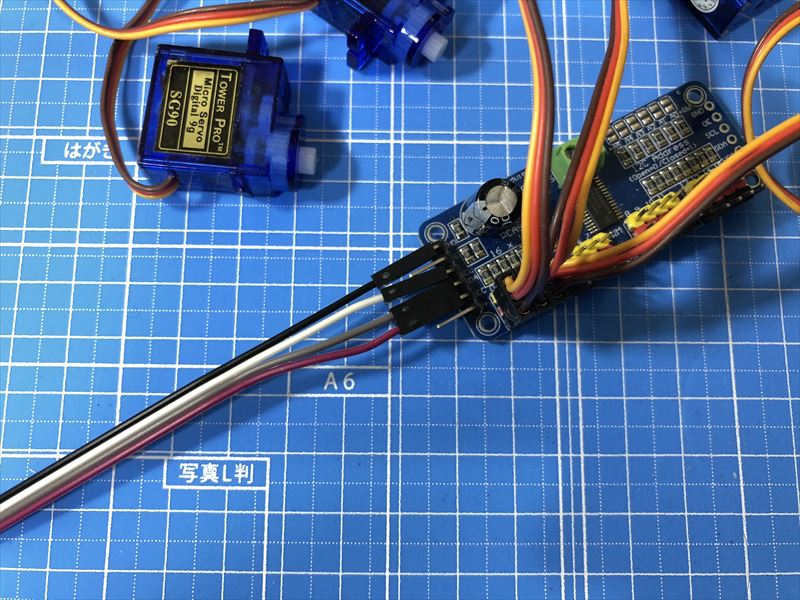
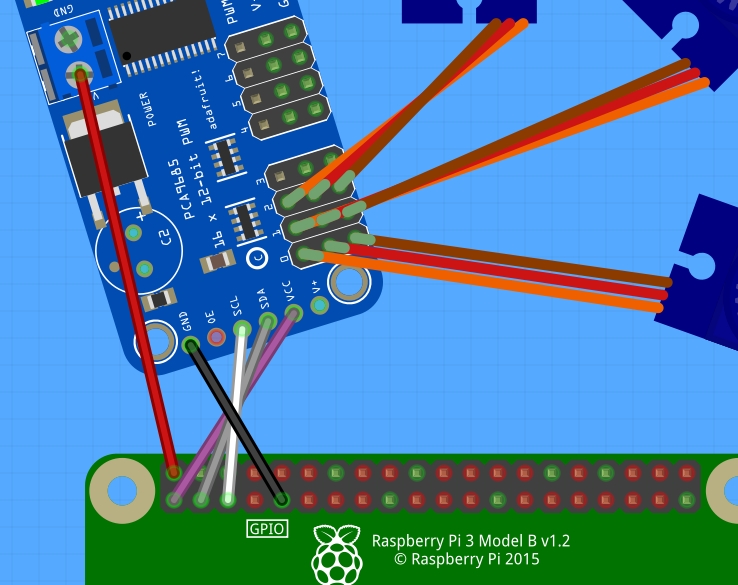
・ジャンパーケーブルの反対側をラズパイに接続してください。ラズパイの端子(GPIO)は2列並んでますが、内側のほうに刺してください。ちなみにラズパイとサーボドライバーボードは「I2C」という方式でやりとりします。

・サーボドライバボードにサーボを動かすための電源を接続します。緑色の箱に2つの穴が空いてますが、右側の穴に細いマイナスドライバーをつっこんでネジをゆるめ、「オス-メス」ジャンパーケーブルのオス側を穴に差し込んだあとネジで固定します。
・「オス-メス」ジャンパーケーブルのメス側をラズパイのGPIOの上列の左端に刺します。ここから5Vの電源が供給されます。

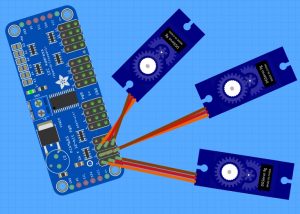
・こんな感じにつながっているでしょうか?
・ラズパイにSDカードを挿しこんでください。

・これで接続完了です。

・ラズパイの電源コネクタに電源を接続してください。起動には20秒ぐらいかかります。
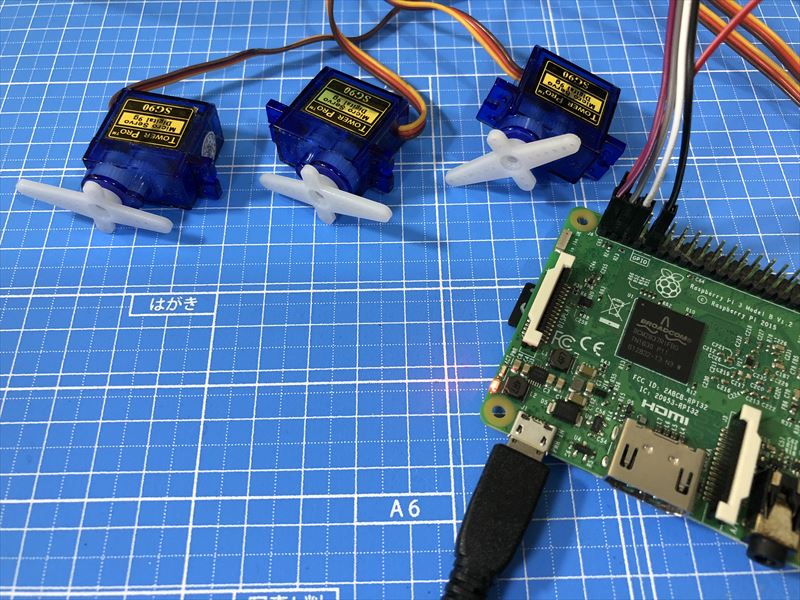
・サーボが回転しているかどうかを分かりやすくするため、付属のサーボホーン(白いプラスチックの部品)をサーボの回転軸に挿しておくとよいと思います。
・3つのサーボがキュイキュイと音を立てて動いたらセンタリング成功です。
・サーボのセンタリングは終了です。お疲れ様でした。
Tips
・サーボのセンタリングを何度もやるのは面倒くさいので、筆者はサーボテスターを買いました。ボタン1押しでセンタリングが完了するので便利です。(Amazon)