
・Googleは様々なプログラムを安価で提供してくれていますが、ここではGoogle Cloud Vision APIを使って画像認識するロボットを作ってみます。
・Vision APIを使う方法はREST方式とCloud SDKを使う方法がありますが、ここではより簡単に始められるREST方式を説明します。
事前の準備
・カメラ、スピーカー、マイクを使いますので、すべて正常に動作している状態にしておいてください。
Google Developers Consoleでの設定
・googleのアカウントを持っていない場合は作ってください。[Google アカウントの作成]
・ [Google Developers Console]にログインしてください。
・ここでプロジェクトを作成し、課金を有効化し、「Cloud Vision API」を有効化し、APIキーを生成します。
・日本語でとても分かりやすく説明しているページがありますので、こちらを参考に進めると良いのではないかと思います。[syncer.jp : Cloud Vision APIの使い方まとめ]
・ここで作成したAPIキーはこのあと使うのでコピーしておいてください。
・登録開始から60日間は3万円まで無料で使えます。
APIキーの埋め込み
・先ほど取得したAPIキーをサンプルプログラムに書き込みます。
・サンプルプログラムをテキストエディターで開いてください。
$ sudo nano sample_vision1.py
・15行目にある「API_KEY = ” 」のクォーテーションの間にAPIキーをペーストしてください。
・エディターを保存終了してください。
サンプルプログラムの実行
・ディスプレイは必須ではありませんが、カメラの視界に対象物をしっかり入れるためには、あったほうがよいです。
$ python sample_vision1.py
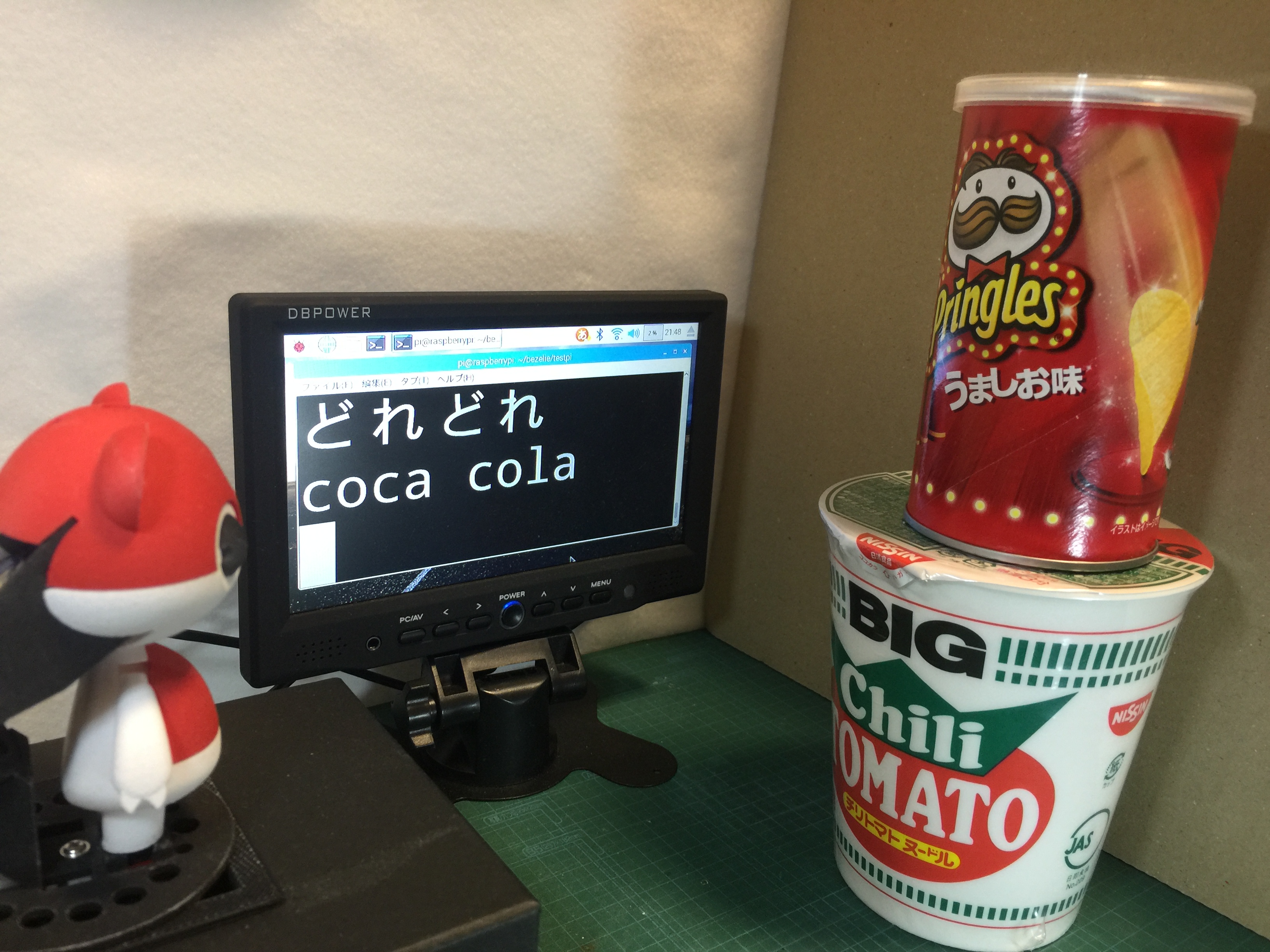
・「これなあに?」「これなんだ?」「これは何?」などと話しかけると、ロボットが「どれどれ」と言うので、カメラの前に対象物を掲げてください。
・最大3つの解答候補が英語で発声および画面に文字表示されます。
・Ctrl+Cで終了させることができます。
ソースコード
#!/usr/bin/python
# -*- coding: utf-8 -*-
# demo Code for Raspberry Pi : Label Recognition of Google Vision API
from time import sleep
import subprocess
import picamera
import requests
import base64
import json
import bezelie
# Variables
GOOGLE_CLOUD_VISION_API_URL = 'https://vision.googleapis.com/v1/images:annotate?key='
API_KEY = '' # Google Cloud Platform Consoleで登録したAPIキー
jpgFile = '/home/pi/Pictures/capture.jpg' # キャプチャー画像ファイル
# Functions
def request_cloud_vison_api(image_base64):
api_url = GOOGLE_CLOUD_VISION_API_URL + API_KEY
req_body = json.dumps({
'requests': [{
'image': {
'content': image_base64.decode('utf-8') # base64でencodeする。
},
'features': [{
'type': 'LABEL_DETECTION',
# 'type': 'TEXT_DETECTION',
# 'type': 'LOGO_DETECTION',
'maxResults': 3,
}]
}]
})
res = requests.post(api_url, data=req_body)
return res.json()
# Setting
bez = bezelie.Control() # べゼリー操作インスタンスの生成
bez.moveCenter() # サーボをセンタリング
# Main Loop
def main():
try:
print "カメラの前に何かをかざしてください"
with picamera.PiCamera() as camera:
camera.resolution = (640, 480) # Change this number for your display
camera.rotation = 180 # comment out if your screen upside down
camera.start_preview()
sleep(1)
while True:
print "--------------------"
camera.stop_preview()
camera.capture(jpgFile)
sleep(0.1)
with open(jpgFile, 'rb') as img:
img_byte = img.read()
img_base64 = base64.b64encode(img_byte)
result = request_cloud_vison_api(img_base64)
for i in range(3):
try:
answer = result['responses'][0]['labelAnnotations'][i]['description'].encode('utf-8')
print (answer)
subprocess.call('flite -voice "kal16" -t "'+ answer +'"', shell=True)
# Other English Voices :kal awb_time kal16 awb rms slt
except:
print ("no answer")
camera.start_preview()
sleep (3)
except KeyboardInterrupt:
# CTRL+Cで終了
print " 終了しました"
if __name__ == "__main__":
main()
応用
・[公式ドキュメント(日本語)]
・このサンプルでは画像に映っている物のカテゴリー名を表示する「LABEL_DETECTION」という機能を使っていますが、42行目あたりでコメントアウトしてある「TEXT_DETECTION」「LOGO_DETECTION」も、ほぼおなじプログラムで使うことができます。「TEXT_DETECTION」は文字認識(OCR)、「LOGO_DETECTION」はロゴ認識です。
・このサンプルでは認識結果を3つ言わせていますが、1つでいいやという場合は72行目あたりにある「for i in range(3):」の数字を1にしてください。