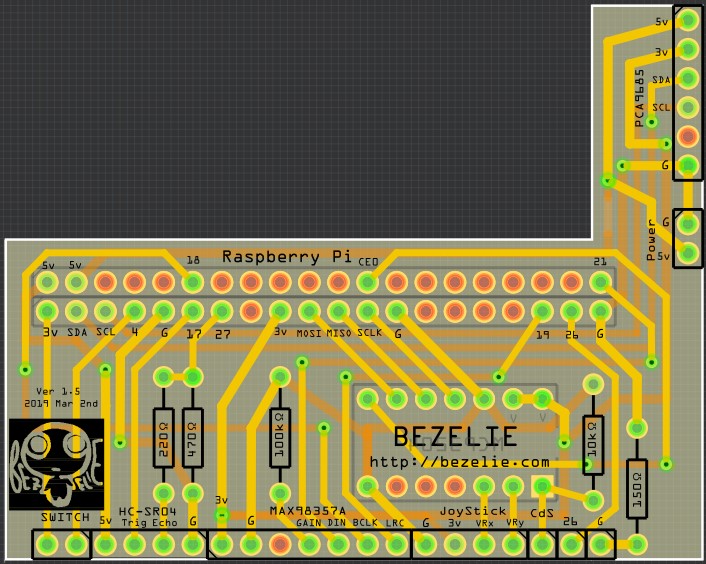
これがベゼリーボード(ラズパイ版)。ラズパイにサーボモータードライバーボードやアンプボードなどを簡単かつコンパクトに接続することができます。

付属のシールを貼ると分かりやすくなります。

お手持ちのラズパイに、ベゼリーボードを接続してみましょう。

ベゼリーボードのピンソケットを、ラズパイのピンヘッダに刺します。同じ大きさなので向きだけ注意してください。

ベゼリーボードの1x6のピンソケットにL字ピンソケットを刺します。

L字ピンソケットにサーボドライバーボードを取り付けます。

ベゼリーボードにアンプボードを差し込みます。

ここがアンプボードを刺す場所です。

サーボドライバーボードに1つめのサーボをとりつけます。
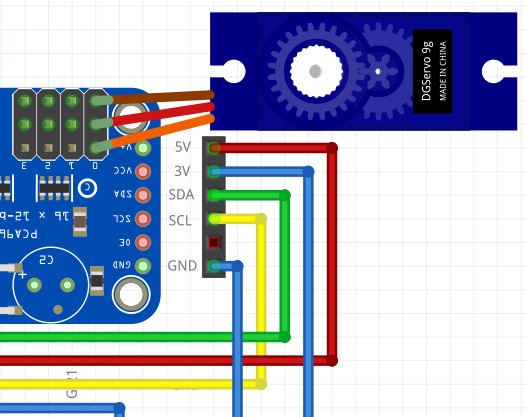
サーボケーブルの色とボードのピンの色を一致させてください。もっともGNDケーブルはサーボ側が茶色でボード側は黒ですが。

2つめのサーボを同じ向きに差し込んでください。

3つめのサーボを同じ向きに差し込んでください。

それではラズパイを起動しましょう。まずはマウス・キーボードをUSB端子に取り付けます。

つぎにHDMIディスプレイにつながったHDMIケーブルをとりつけます。

最後に電源ケーブル(マイクロUSBケーブル)を取り付けます。
ベゼリー用ディレクトリの作成

ラズパイが起動したらLXTerminalを開いてください。
LXTerminalに下記のように打ち込んでください。
1行目でディレクトリ「bezelie」を作成(メイクディレクトリ)し、2行目でそのディレクトリに移動(チェンジディレクトリ)しています。
sudo mkdir bezelie
cd bezelie
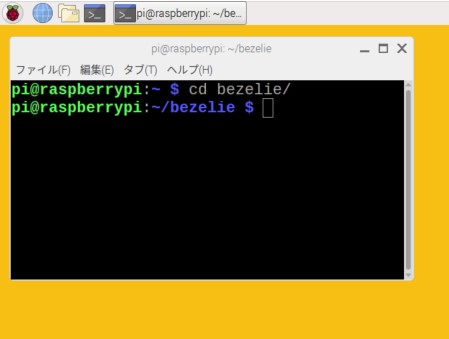
ディレクトリ「bezelie」に移動できたでしょうか。
gitレポジトリのクローン
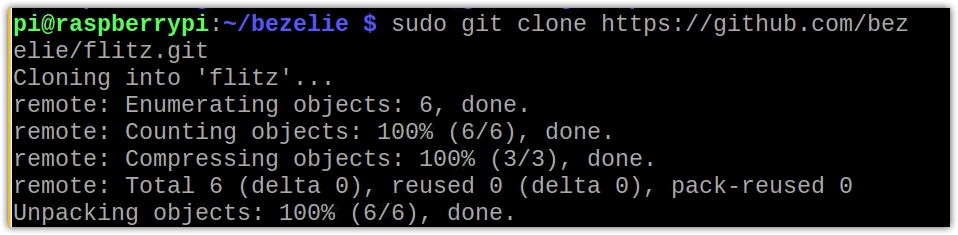
ベゼリーのサンプルプログラムをダウンロードしましょう。
下記のコマンドを実行すると、ディレクトリ「bezelie」の下に新ディレクトリ「flitz」が作られ、そこにgitサーバー上のサンプルプログラムがコピーされます。
sudo git clone https://github.com/bezelie/flitz.git
新たに作成された「flitz」ディレクトリに移動しましょう。
ちなみに「フリッツ(flitz)」というのは今回のべゼリーのコードネームというか愛称です。
cd flitz
flitzディレクトリにどんなサンプルプログラムがダウンロードされたのか、「ls(リスト)」コマンドで表示してみましょう。
ls
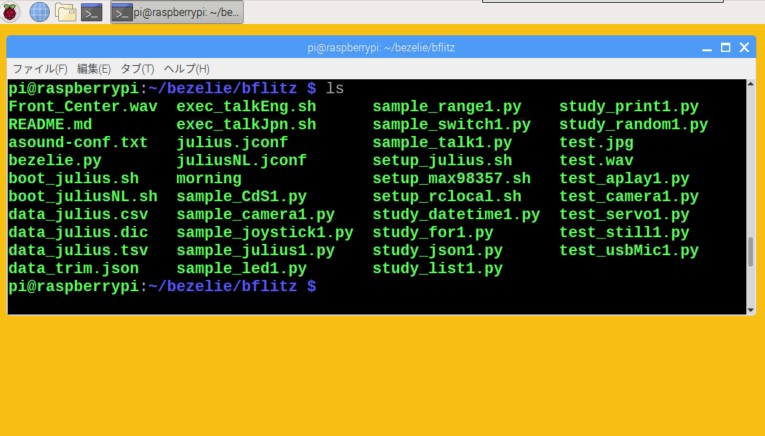
たくさんのサンプルプログラムがダウンロードされてますね。(左の写真とは異なる場合があります)
サーボのセンタリング
サーボは180度回転することができるのですが、ベゼリーを組み立てる前に、ちょうどまんなかの90度の状態に合わせておく必要があります。これをやっておかないと、初期状態でベゼリーの姿勢が傾いてしまうことがあるからです。
3つのサーボにサーボホーンをとりつけ、サーボモータードライバーボードに接続されていることを確認したうえで、python3のスクリプト「bezelie.py」を実行してください。
python3 bezelie.py
ここで「サーボドライバーボードを接続してください」というエラーメッセージが表示されてしまった場合は、サーボモータドライバボードの赤いLEDが明るく光っているかどうかを確認してください。LEDが消えている場合は、接続不良の可能性がありますので、コネクタを刺し直してください。LEDが暗い場合は電流不足の可能性があります。Raspberry Pi 3なら2.4A、Raspberry Pi 4なら3.0A以上の電流が必要ですので、ACアダプタのスペックをご確認ください。
サーボが一瞬キュキュッと回転したら成功です。たいていの場合、ちょっとしか回転しないので、回転したことがわかりやすいように、先ほどサーボホーンをとりつけたというわけです。