
回転テーブルに固定されたいちばん下のサーボ(yawサーボ)のケーブルをサーボドライバーボードのいちばん奥のピンに刺します。

次に背中側に突き出しているサーボ(rollサーボ)のケーブルをサーボドライバーボードのひとつ手前のピンに刺します。

3つ目のサーボ(pitchサーボ)のケーブルをサーボドライバーボードの3番目のピンに差し込みます。

yawサーボに十字型サーボホーンをとりつけます。

ベゼリーのボディーをベゼリーボックスの上にもってきて場所を合わせます。

サーボについてきたネジのうち、長いほうのネジを使ってyawサーボホルダーをボックスに固定します。

しっかり固定されたでしょうか。
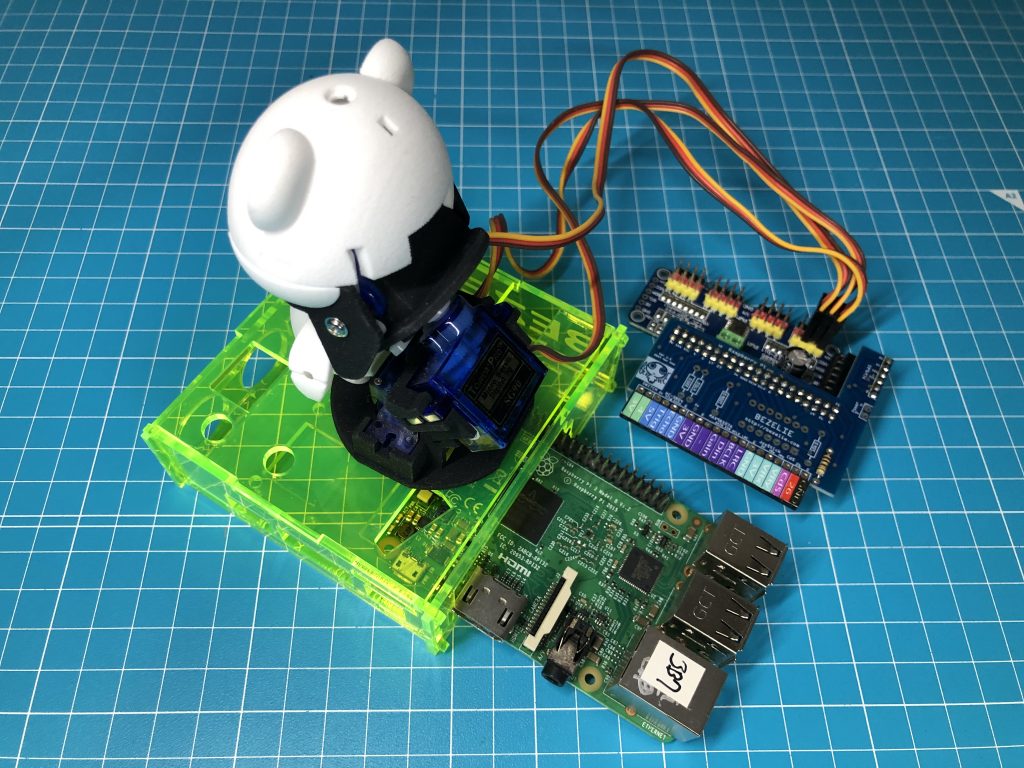
ラズパイをべゼリーボックスの中に収めましょう。model Bの場合は背面端子が大きいため、いったんべゼリーボードを外して、べゼリーボックスの後ろから刺してください。

スピーカーを前面パーツのスピーカー穴の位置にもってきます。

スピーカーホルダーでスピーカーをボックスに固定します。

これで完成です。お疲れ様でした。